|
此时,转子R从图位置向左τ/6的稳置,τ/6为三相永磁步进电机的步距角,即步距角为转子一对极极距的1/6。与两相永磁步进电机的1/4相比,分辨率提高1.5倍。第三步:T4关断,T2变成导通,C相和A相的线圈导通,转子到如上面的三相PM步进电机运行原理图所示的稳置,转子R又向左τ/6。依次切换功率管,使定子绕组依次导通,实现上面的三相PM步进电机运行原理图、(e)、(f)步骤的激磁,使转子依次步进。
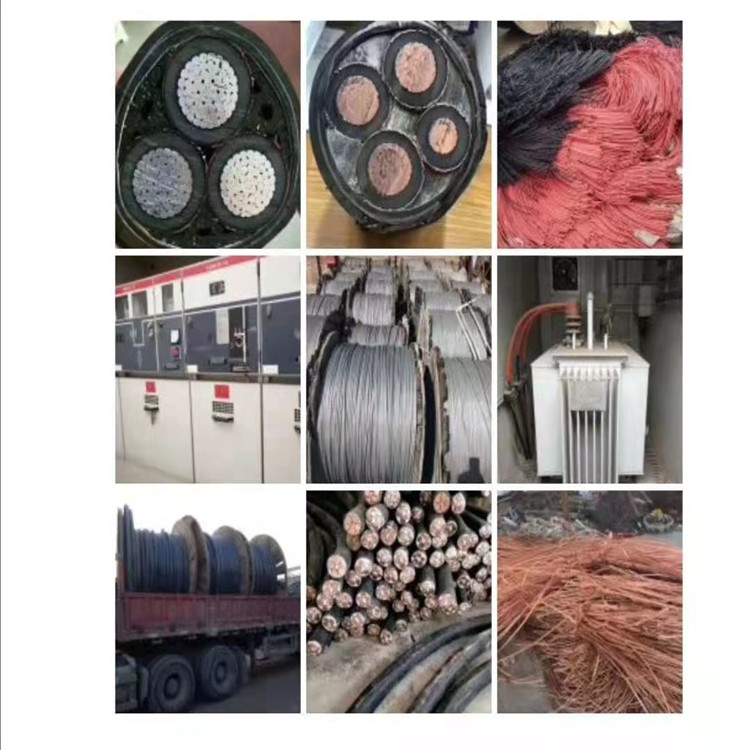
废旧电缆的分类
1.绝缘种类:V代表聚氯乙稀;X代表橡胶;Y代表聚乙;YJ代表交联聚乙;Z代表纸。
2.导体材料:L代表铝;T(省略)代表铜。
3.内护层:V代表聚氯乙稀护套;Y聚乙护套;L铝护套;Q铅护套;H橡胶护套;F氯丁橡胶护套。
4.特征:D不滴流;F分相;CY充油;P贫油干绝缘;P屏蔽;Z直流。
5.控制层:0无;2双钢带;3细钢丝;4粗钢丝。
6.外被层:0无;1纤维外被;2聚氯乙稀护套;3聚乙护套。
7.阻燃电缆在代号前加ZR;耐火电缆在代号前加NH。
需用适当方式尘垢。各种纯铜废料,主要包括铜材厂和铜厂产生的纯铜的边角料、切头、废次材、半成品、线材、废品等;允许有报废的纯铜裸线和铜管等其它纯铜制品,但不许有水垢、油污、涂层等;废铜料中不允许含有任何杂质和铜合金,也不许含有毛丝、车屑、磨屑和厚度小于1mm的铜板。其实他们都叫紫铜,不过市场比较多的那种叫紫杂铜,铜含量在80%左右,还有黄铜也的比较多的废金属品种,一般的黄铜是59黄铜就是含纯铜59%的,其余的成分以锌为主,这种铜也叫黄杂铜。经营理念:信守于胸,惠至于人。服务铸就形象,信誉成就辉煌。电线电缆:长期高价各类废旧电线电缆、氟塑料电线电缆、绝缘电线电缆、数据电线电缆、MC电线电缆、补偿电线电缆、加热电线电缆、船用电线电缆、矿用电线电缆、高温电线电缆、阻燃电线电缆服务。
同一编号的定时器不要在相邻的步程序中使用,不是相邻的步程序中则可以使用不能同时动作的输出线圈尽量不要设在相邻的步程序中,因为可能出现下一步程序始执行时上一步程序未完全复位,这样会出现不能同时动作的两个输出线圈同时动作。如果必须要这样,可以在相邻的步程序中采用软联锁保护,即给一个线圈串联另一个线圈的常闭触点。在步程序中可以使用跳转指令。在中断程序和子程序中也不能存在步程序,在步程序中 多可以有4级FORいNEXT指令嵌套。
公司服务宗旨:以价优为基础,公平求生存,以信誉作保证的合作态度对待每一个客户;热情欢迎来电咨询洽谈,你的一个电话,本公司将派专员免费评估,使您足不出户,就能享受到我们的人性化服务!
经营范围:废旧物资,废旧设备,废旧金属,废铜,电缆,废旧锅炉,废旧电缆、废旧电机、废旧变压器
步进电机和伺服电机是工控领域应用 广泛的两类产品,而它们的核心分别是步进电机控制器与伺服电机控制器,本文将给大家讲解这两种器件不一样的地方。工作原理的不同步进电机控制器:它是一种能够发出均匀脉冲信号的电子产品,它发出的信号进入步进电机驱动器后,会由驱动器转换成步进电机所需要的强电流信号,带动步进电机运转。步进电机控制器能够准确的控制步进电机转过每一个角度。驱动器所接收的是脉冲信号,每收到一个脉冲,驱动器会给电机一个脉冲使电机转过一个固定的角度,就因为这个特点,步进电机才会被广泛的应用到现在的各个行业里。用户定义数据类型的生成和使用在SIMATIC管理器的左面窗口”块“,执行菜单命令插入-S7块-数据类型,生成新的UDT,在生成UDT的元素时,可以设置它的初始值和加上注释,如下图从表面上看UDT1与stack完全相同,但是它们有本质区别。结构(STRUCT)是在数据块声明视图方式或逻辑块的变量声明表中与别的变量一起定义的,但是UDT必须在特殊的数据块内单独定义,并单独存放在一个数据块中。生成UDT后,在定义变量时将它作为一个数据类型来多次使用,:在变量声明表中定义一个变量,其数据类型为UDT1,名称为ProData如下图上图可以看出,UDT在数据块中的使用方法与其他数据类型(如INT)是一样的。
|