|
步进电机的位置时,因为电机负载和转子储存的动能,不能立即停止,会产生超调量,反复经过设定点后停下来。此种反复振荡延长了时间,有必要改善电机的阻尼和时间。改善的方法有阻尼器和利用驱动电路及电机本身的改善等,下面将分别加以说明。利用阻尼器的改善右图表示带误差动态阻尼器的步进电机的照片。此种阻尼器是在步进电机轴的飞轮上橡胶等特性装置,使飞轮的运动滞后于转轴的运动,利用与转子间的振动相位差对转子进行制动,改善暂态特性。
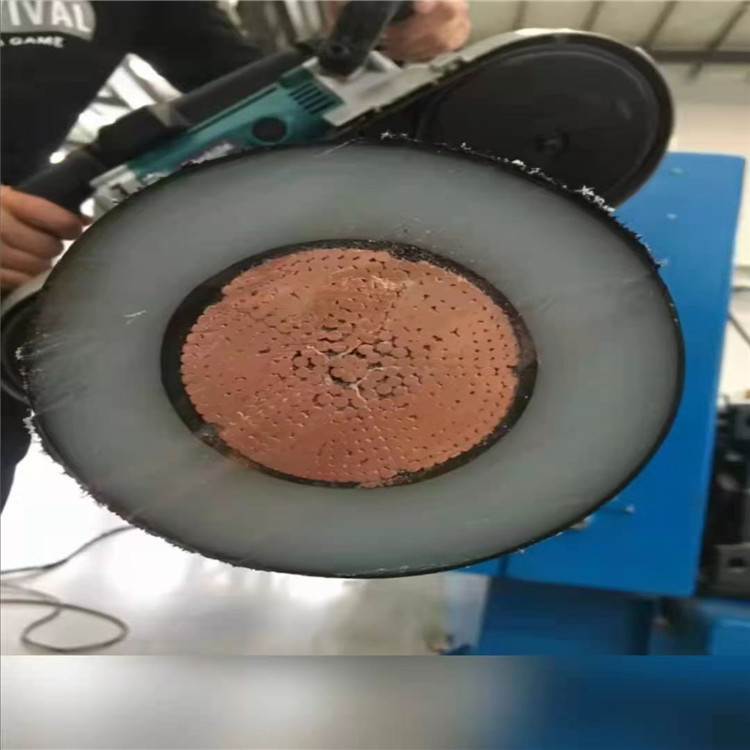
废旧电缆的分类
1.绝缘种类:V代表聚氯乙稀;X代表橡胶;Y代表聚乙;YJ代表交联聚乙;Z代表纸。
2.导体材料:L代表铝;T(省略)代表铜。
3.内护层:V代表聚氯乙稀护套;Y聚乙护套;L铝护套;Q铅护套;H橡胶护套;F氯丁橡胶护套。
4.特征:D不滴流;F分相;CY充油;P贫油干绝缘;P屏蔽;Z直流。
5.控制层:0无;2双钢带;3细钢丝;4粗钢丝。
6.外被层:0无;1纤维外被;2聚氯乙稀护套;3聚乙护套。
7.阻燃电缆在代号前加ZR;耐火电缆在代号前加NH。
从而形成了线缆的专用设备系列。如挤塑机系列、拉线机系列、绞线机系列、绕包机系列等。指出,电线电缆的工艺和专用设备的发展密切相关,互相促进。新工艺要求,促进新专用设备的产生和发展;反过来,新专用设备的发,又提高促进了新工艺的推广和应用。如拉丝、退火、挤出串联线;物理发泡生产线等专用设备,促进了电线电缆工艺的发展和提高,提高了电缆的产品质量和生产效率。1.手工剥皮法:该法采用人工进行剥皮,效率低、成本高,而且工人的操作环境较差;2.焚烧法:焚烧法是一种传统的方法。使废线缆的塑料皮燃烧,然后其中的铜,但产生的烟气污染极为严重,同时,在焚烧过程中铜线的表面严重氧化,降低了金属率,该法已经被各国严格禁止;
IN/OUT类型:将位置的参数传到子程序,从子程序来的结果值被返回到同样的地址。常数和地址值不允许作为输出参数。TEMP类型:局部存储器只能用作子程序内部的暂时存储器,不能用来传递参数。局部变量表的数据类型可以是能流、布尔(位)、字节、字、双字、整数、双整数和实数型。能流是指仅允许对位输入操作的布尔能流(布尔型),梯形图表达形式为用触点(位输入)将电源母线和指令盒连接起来。在局部变量表输入变量名称、变量类型、数据类型等参数以后,双击指令树中的子程序(或选择点击方框快捷按钮,在出的菜单中选择子程序项),在梯形图显示区显示出带参数的子程序调用指令盒。
公司服务宗旨:以价优为基础,公平求生存,以信誉作保证的合作态度对待每一个客户;热情欢迎来电咨询洽谈,你的一个电话,本公司将派专员免费评估,使您足不出户,就能享受到我们的人性化服务!
经营范围:废旧物资,废旧设备,废旧金属,废铜,电缆,废旧锅炉,废旧电缆、废旧电机、废旧变压器
弱电建筑智能化人类在发展,社会在进步,将“弱电”定义为建筑智能化的概念已不能适应现状,与“弱电”工程特点和工作内容相符的新系统越来越多,工程范围也越来越广,有些项目无法界定行业管理。“建筑智能化”已经不能概括“弱电”范畴。我想,我们是不是可以给弱电定义一个这样的范畴:弱电:“以硬件系统为主的民用智能系统项目”以及“民用智能系统项目中硬件系统子项”的总称,包括产品/系统及解决方案、项目确立、规划设计、实施落地及 终使用维护全过程。比较单极式与双极式的驱动电路,单极式驱动电路功率管用4个,线圈电流在线圈内单一方向流动。相对的双极式的驱动电路功率管的个数为单极式的2倍,需要8个。正向与反向的电流在线圈内正反向交替流过,Tr1与Tr4或Tr3与Tr2同时而且交替导通。Tr1与Tr3即使短时同时导通,也会造成电源短路,产生很大的电流,因此有必要附加防止短路电路,双极式的驱动电路比单极的情况要复杂。低速时的效率双极式比较好,张图所示的单极式与双极式的导线线径相同,单极情况的线圈匝数为N,其电阻为R,相对双极的匝数为2倍的2N,线圈电阻也变成2R。
|