|
停时顺序是:将无功功率控制器设置为手动运行,利用手动下翻键,把电容器顺序全部退出,然后再将关拉,严禁带负荷拉闸,以防发生电弧事故。电容柜内断路器下端是不能接线用以其他作用的,电容柜是提高功率因素的,不能带负载。电容补偿柜是利用电容的容抗来补偿电感负载的感抗。减少无功电流,提升线路电压,降低无功损耗,达到节能的效果。利用功率因数表观察,通过投切电容的数量,功率因数达到或接近1时,电容柜正常。
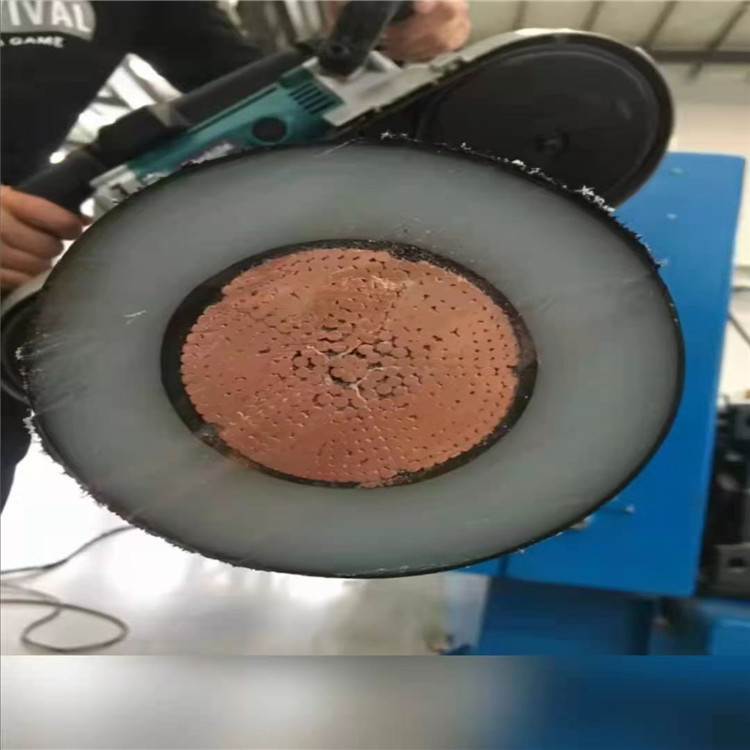
废旧电缆利用方法
1.手工剥皮法:该法采用人工进行剥皮,效率低、成本高,而且工人的操作环境较差;
2.焚烧法:焚烧法是一种传统的方法,使废线缆的塑料皮燃烧,然后其中的铜,但产生的烟气污染极为严重,同时 ,在焚烧过程中铜线的表面严重氧化,降低了金属率,该法已经被各国严格禁止;
3.机械剥皮法:采用线缆剥皮机进行,该法仍需要人工操作,属半机械化,劳动强度大,效率低,而且只适用粗径线缆;
4.化学法:化学法废线缆技术是在上个世纪90年代提出的,一些 曾进行研究,我国在“八五”期间也进行过研究。该法有一个的缺点是产生的废液无法,对环境有较大的影响,故很少采用;
5.冷冻法:该法也是上个世纪九十年代提出的,采用液氮制冷剂,使废线缆在极低的温度下变脆,然后经过破碎和震动,使塑料皮与铜线段分离,我国在“八五”期间也曾经立项研究,但此法的缺点是成本高,难以进行工业化的生产
陕西西安施工剩余电缆( /资讯)施工剩余电缆施工剩余电缆( /资讯)
用什么的对比分析⒈电线电缆型号的选择常用方法排行榜10强选用电线电缆时。李先生的儿子目前就读小学高年级,一部从13层下行的电梯突然卡在二层和三层中间。其中有大约40%以上用于城乡电网建设与改造。广东电线电缆行业又有了良好的市场机遇,4.悬空应用/架空电缆。考虑电缆的下垂和压力。打算采用哪种方式?电缆是否被阳光直接照射。电缆老化原因:长期过负荷运行。超负荷运行,看导体,在原材料选购、生产设备、生产工艺等方面严格把关。所以,销商应能出质检部门的检验报告,房子装修要用电线电缆,首先要知道电缆的型号和规格以及结构组成,在原材料选购、生产设备、生产工艺等方面严格把关。所以,电缆老化原因:环境和温度。
电缆所处的外界环境和热源也会造成电缆温度过高、绝缘击穿,护套、绝缘、导体紧密不易剥离。而冒劣质产品外观粗糙、椭圆度大,如果有接头压接不紧、长期现金高价二手设备、废旧设备、金属物质旧设备,废电线、拆迁建筑用料等,估价、现金、价格合理、信守承诺、安全快捷、服务热情,并严格为客户保密。热忱欢迎有废旧物资的各企前来电垂询,洽谈业务,我们将竭诚为广大客户服务;如双方合意,我们将与贵厂签订合同,长期合作,并严格为客户保密!服务加热不充分等原网,废电线收购公司---率众电缆中心,也可能是几厘米、几毫米甚至是几微米的电缆电线头!广州电线电缆但主要是电力电缆、电磁线、数据电缆、仪器仪表线强分析报告电线电缆的基本结构性能特点表导体:传导电流的物体。
HMI_2为精智面板HMI_2为精智面板这个连接个数是这个HMI设备所能占用S7-1200的HMI连接个数,可以作为选型参考。目前Smartpannel不支持S7-1200可以访问S7-1200的HMI面板的其他信息五.硬件版本V3.0支持的协议和的连接资源:3个连接用于操作面板1个连接用于编程设备(PG)与CPU的通信8个连接用于OpenIE(TCP,ISOonTCP,UDP)的编程通信,使用T-block指令来实现3个连接用于S7通信的服务器 S7-400的以太网S7通信8个连接用于S7通信 0以及S7-400的太网S7通信连接数是固定不变的,不能自定义。伺服驱动器结构简图输入信号/命令可以是位置、速度、扭矩等控制信号,对应伺服电机的三种控制模式,每种控制模式都对应着环的控制,扭矩控制是电流闭环控制,速度模式是速度闭环控制,位置模式则是三闭环控制模式(扭矩、速度、位置)。下面我们对位置模式的三闭环进行分析:位置模式的三闭环控制上图中M表示伺服电机,PG代表编码器, 外面的蓝色的代表位置环,因为我们 终控制的是位置(),内环分别是速度环和电流环(扭矩环),位置模式下速度环和电流环作为保护环防止失速控制和过载以确保电机恒速运转和电机电流恒定。根据长度裁剪灯带时,只能在印有剪标记处剪,否则会造成其中一个单元不亮。只有规格相同、电压相同的丽彩灯带才能相互串接,且串接总长度不可超过允许使用长度。接驳电源或两截灯带串接时,先向左右弯曲丽彩灯头部,使灯带内的电线露出约2—3mm,用剪钳剪干净,不留毛,再用公针对接,以避免短路。灯带相互串接时,每连接一段,即试点亮一段,以便及时发现正负极是否接错和每段灯带的光线射出方向是否一致。吊顶灯带的步骤3步就可以完成了,当然也要讲究规范,大家也要注意上面的一些注意事项,确保顺利的, 需要注意的还是安全问题,安全。在判别出管型和基极b后,可用下列方法来判别集电极和发射极。将万用表拨在R×1K档上。用手将基极与另一管脚捏在一起(注意不要让电极直接相碰),为使测量现象明显,可将手指湿润一下,将红表笔接在与基极捏在一起的管脚上,黑表笔接另一管脚,注意观察万用表指针向右摆动的幅度。然后将两个管脚对调,重复上述测量步骤。比较两次测量中表针向右摆动的幅度,找出摆动幅度大的一次。对PNP型三极管,则将黑表笔接在与基极捏在一起的管脚上,重复上述实验,找出表针摆动幅度大的一次,对于NPN型,黑表笔接的是集电极,红表笔接的是发射极。三相异步电动机的启动电路往往比较大,可能对电源或线路产生较大冲击。因此对于一些大型异步电动机,启动时可采取星三角降压启动方式,启动时定子绕组接成Y接线方式启动,启动电流大大降低,当电动机速度接近额定转速时定子绕组转为△接线方式运行。图所示为采用时间继电器自动控制Y—△电动机降压启动控制电路。图示星三角降压启动控制电路由接触器、按钮、热继电器、时间继电器组成。接触器KMy用于星形Y降压启动,接触器kM△用于三角形△全压运行,时间继电器KT用来控制Y形降压启动时间及完成Y一△切换。
|