|
现今的首要问题是,如何规范该产业的管理、提高产品质量,使产业顺利地转型升级,获得健康的发展,并逐步打造出华东市展华再生资源公司的 企业和世=界 可以,而不需要再由部门联合进行强制性的整治行业行为。我国的电线电缆工业“大而不强”的现状仍然是产业结构的主要矛盾,“ 产品供不应求,低端产品供过于求”的局面还没有得到根本的改变。我国只有30%的线缆品种达到国=际市场能接受和可参与竞争的水平,还有70%的产品急需提高产品水平和档次,特别是还不能与电缆跨国公司相抗衡。我国的电线电缆行业有着巨大的发展潜力,而如果要想把这种潜力完全发挥出来,产品的科技含量就需要大幅提高。由于b2b的影响阻挡了电线电缆行业的高速增长。
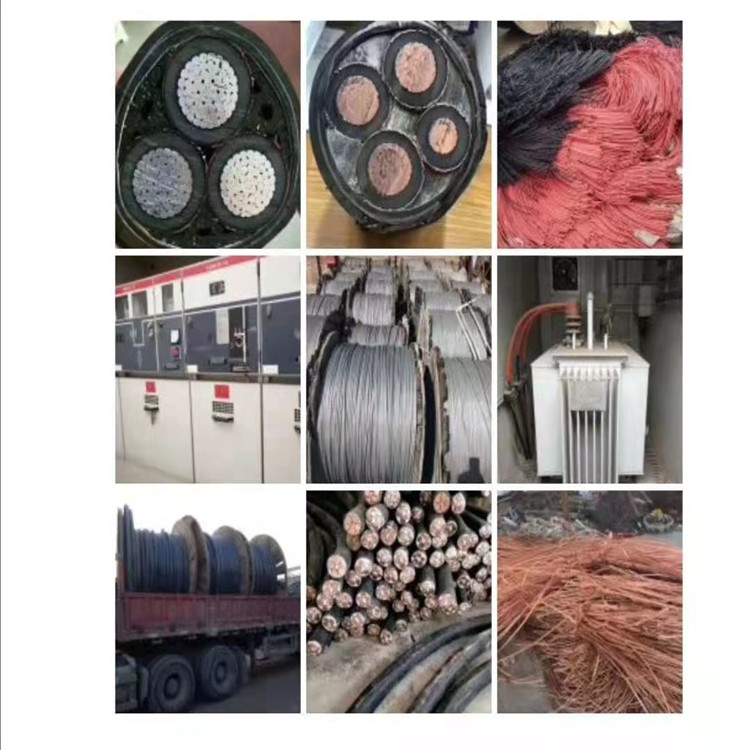
新疆克孜勒光伏板组件变压器专业团队
的业务范围:高价电缆、废铜、有色金属、变压器、废旧结晶器铜管、废旧风口铜、红铜、黄铜、紫铜、铜板、电机、配电柜等含铜设备等业务。我公司具有一定的库存,能长期稳定为附近和周边地区及临近省稳定的货源,质量方面已取得合作厂家的肯定并成为他们的友好商业伙伴,并和 多个省的同行长期合作和交流。宗旨:始终坚持着"诚信经营,公平公正"的
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置。试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。通过控制卡打伺服的使能信号。这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。一般控制卡上都会有零漂的指令或参数。使用这个指令或参数,看电机的转速和方向是否可以通过这个指令。如果不能控制,检查模拟量接线及控制方式的参数设置。电路中有电压表和电流表,可同时测量电压和电流。三相功率的测量方法三相四线制供电,负载星形连接(即Y0接法)对于三相不对称负载,用三个单相功率表测量,测量电路如所示,三个单相功率表的读数为WWW3,则三相功率P=W1+W2+W3,这种测量方法称为三瓦特表法;对于三相对称负载,用一个单相功率表测量即可,若功率表的读数为W,则三相功率P=3W,称为瓦特表法。三相四线制负载星形联接三相三线供电三相三线制负载星形联接三相三线制供电系统中,不论三相负载是否对称,也不论负载是Y或△连接,都可用二瓦特表法测量三相负载的有功功率。下图给出一个二维数组ARRAY[1..2,1..3]的内部结构,它共有6个字节的元素,图中每一个小格为二进制的1位,每个元素占一行。ARRAY后面的方括号的数字用来定义每一维的起始元素 2767之间的整数。每维之间的数字用逗号隔,每一堆始和结束的编号用两个小数点隔。如果有一维有N个元素,该维的起始元素和结束元素的编号可以采用1和N,ARRAY[1..100]结构结构(STRUCT)可以是不同类型的数据组合,可以用基本数据类型、负载数据类型(包括数组和结构),和用户定义数据类型(UDT)为结构的元素,一个结构可以由数组和结构组成,结构可以潜逃8层。日常工作中 常见的三相异步电动机有鼠笼型电机和绕线式电机。这是根据它们的转子结构来分类的。鼠笼式三相异步电动机绕线式异步电动机从外观上看, 明显的区别就是绕线式电机带转子滑环,鼠笼式电机不带。鼠笼型电机转子绕组是自己短路的绕组,在转子在每个槽中放有一根导体,导体比铁芯长,在铁芯两端用两个端环将导体短接,形成短路绕组。若将铁芯去掉,剩下的绕组形状似松鼠笼子,故称鼠笼式绕组。鼠笼型电机转子绕线型电机:转子是铜线绕制的线圈,线圈末端是通过滑环引到启动控制设备上。
|