|
单极型线圈可以取代上图所示双极型线圈,运行时具有相同的步距角。上图中的两相单极型线圈在有些文献中也被称为四相步进电机,此时其转子极对数、齿数Nr,以及步距角θs均与双极型线圈相同。本课程两相电机的定义符合式θs=180°/PNr,即将转子齿数和步距角θs代入式θs=180°/PNr,如P=2,则为两相电机,如Nr相同,P=4,步距角θs只有1/2,则电机为四相电机,在此特别提请注意。两相步进电机现在应用广泛,实际电机的构造比图(PM双极型两相步进电机结构与运行原理)复杂,定子除采用叠片外,还有爪极结构,但基本原理可参考图(PM双极型两相步进电机结构与运行原理),图中所示的转子被称为PM型( 磁铁或永磁式)转子,磁性圆柱的外表面形成转子磁极。
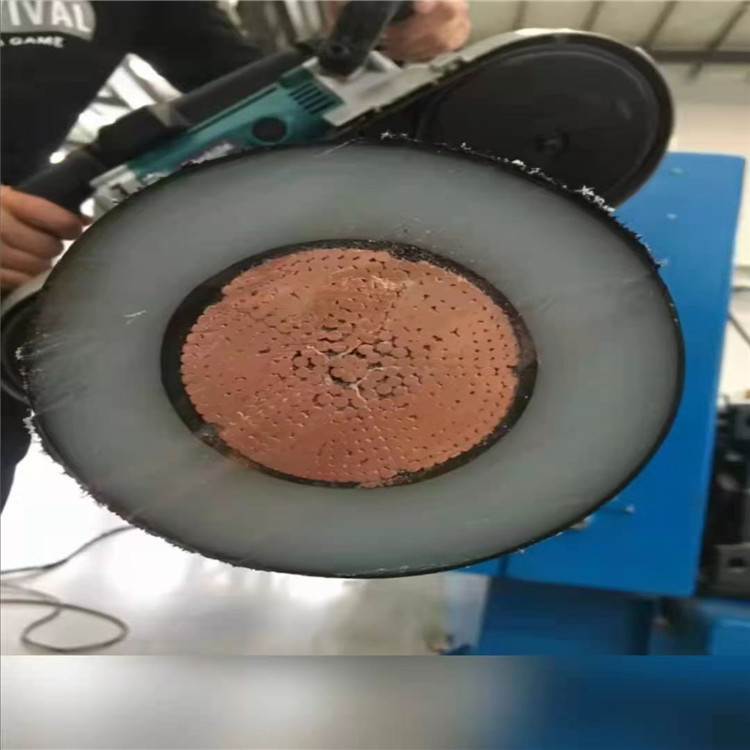
废旧电缆利用方法
1.手工剥皮法:该法采用人工进行剥皮,效率低、成本高,而且工人的操作环境较差;
2.焚烧法:焚烧法是一种传统的方法,使废线缆的塑料皮燃烧,然后其中的铜,但产生的烟气污染极为严重,同时 ,在焚烧过程中铜线的表面严重氧化,降低了金属率,该法已经被各国严格禁止;
3.机械剥皮法:采用线缆剥皮机进行,该法仍需要人工操作,属半机械化,劳动强度大,效率低,而且只适用粗径线缆;
4.化学法:化学法废线缆技术是在上个世纪90年代提出的,一些 曾进行研究,我国在“八五”期间也进行过研究。该法有一个的缺点是产生的废液无法,对环境有较大的影响,故很少采用;
5.冷冻法:该法也是上个世纪九十年代提出的,采用液氮制冷剂,使废线缆在极低的温度下变脆,然后经过破碎和震动,使塑料皮与铜线段分离,我国在“八五”期间也曾经立项研究,但此法的缺点是成本高,难以进行工业化的生产
广东茂名矿缆光伏板组件实力雄厚
就会影响整根电缆质量。质量缺陷越是发生在内层,而且没有及时发现终止出产。那么造成的损失就越大。由于电线电缆的出产不同于式的产品,可以拆重装及更换另件;电线电缆的任一部件或工艺过程的质量题目,对这根电缆几乎是无法挽回和弥补的。事后的都是十分消极的,不是锯短就是降级,要么报废整条电缆。它无法拆重装。电线电缆的质量治理,必需贯穿整个出产过程。质量治理分要对整个出产过程巡回检查、操纵人自检、上下工序互检,这是保证产品质量,进步企业经济效益的重要保证和手段。2.出产工艺门类多、物料流量大电线电缆涉及的工艺门类广泛,从有色金属的熔炼和压力,到塑料、橡胶、油漆等化工技术;纤维材料的绕包、编织等的纺织技术。
下面说说三菱PLC在ST语言下的一些不足:只能声明一维数组三菱PLC只能声明一维数组,这对编程人员来说有了很大的限制。像西门子、倍福、施耐德都是可以声明多维数组的:上图是门子博图软件声明的一个三维int数组,如果三菱支持这个功能,上面蜘蛛纸牌的程序中BEHIND_LINE[ii].Numb[jj]就不必写成结构体+数组的形式,直接写成一个二维数组BEHIND_LINE[ii,jj]就可以了。只能建立一层结构体在三菱的结构体中只能声明基本类型的标签,无法声明其他的结构体,这也注定了三菱不能像施耐德和西门子那样完成复杂的逻辑功能。上式(T2=IΦsinδ)表示前文《PM型电机转矩的产生及负载角》及文《HB型电机的转矩与负载关系》的图中转矩,如增加负载,δ也增加,至π/2时为其值。以上细分步进驱动方式是降低振动极为有效的手段。此时, 磁铁所产生的磁通分布定为正弦波。HB型步进电机的转子在dq轴方向分离成两个磁通,并且磁极上有很多的齿,容易产生高次谐波,除式T2=IΦsinδ所示的值外,还含有其他频率成分的磁场。如上所述的细分步进驱动,降低振动的要点如下:第细分步进越是在低速运行时效果越好。并且加上程序互锁电路,具体如下:首先在2个自保持回路中加入互锁电路——网络1的Q0.1常闭点和网络2的Q0.0常闭点。题意2说按下停止按钮后5秒,才能按启动按钮,所以网络3按下I0.2停止按钮后,M0.0得电自保持,计时器T37计时5s后,将M0.0的自保持回路停掉。并且在网络1和网络2中加M0.0的常闭点,使M0.0得电时网络1和网络2即使按了正转按钮或者反转按钮也不会使Q0.0或Q0.1得电。题意3要求SB1和SB2同时按下,电动机停止转动,并且不起动,同时报灯L1亮1秒暗1秒不断闪烁。拼接屏,显示器,监视器等控制设备控制设备用于控制摄像机、多画面切换、录像、拍照等。所有可控摄像机都可以在打窗口画面上按下鼠标右键进行控制,也可选择右侧的按钮进行控制。具体有灯光关、镜头变近变倍远、聚焦近聚焦远、雨刷关、打/关闭双向语音对讲、方向控制等功能传输端1,光光纤线。多模光纤。多模光纤(MultiModeFiber):中心玻璃芯较粗(50或62.5μm),可传多种模式的光。但其模间色散较大,这就限制了传输数字信号的频率,而且随距离的增加会更加严重。因为转子产生的输出转矩T1与负载角成正弦关系变化,转矩为Tm1,则表达式为:T1=Tm1sinδ故负载转矩TL与δ平衡。下图的纵轴表示转矩T1,横轴表示负载角,δ=π/2位移角时,产生电磁转矩。当负载转矩大于电磁转矩时,δ>π/2,定子磁场将无法带着转子以同步速度旋转,此现象称为失步现象。实际步进电机的定子不是如前图所示的 磁铁旋转,所谓两相电机,是指空间相差π/2的两个线圈,通过相差π/2相位差的交流电流后,产生旋转磁场。
|