|
如果输入值在下限LO_LIM和上限HI_LIM的范围以外,输出(OUT)限位到与其相近的上限或下限值(视其单极性UNIPOLAR或双极性BIPOLAR而定),并返回错误代码。2下面给大家举个例子:如输入I0.0为1,SCALE功能被执行。下面的例子中,整形数22将被转换成0.0到100.0的实数并写到OUT。输入是双极性BIPOLAR,用I2.0来设置。程序中调用的FC105执行前:IN----MW10=22HI_LIM---MD20=100.0LO_LIM--MD30=0.0OUT-MD40=0.0BIPOLARI2.0=TRUE执行 06与上同,不在举例了。
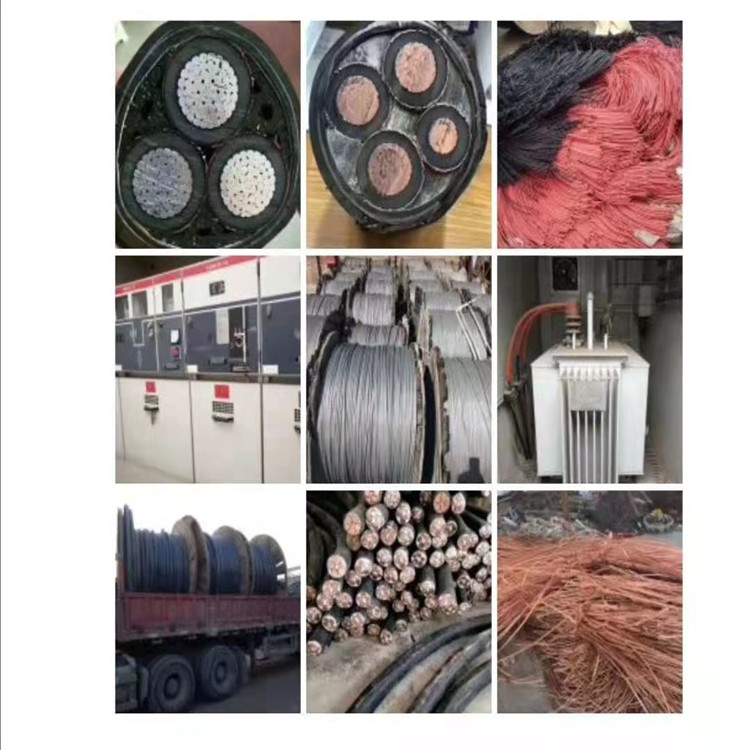
废旧电缆利用方法
1.手工剥皮法:该法采用人工进行剥皮,效率低、成本高,而且工人的操作环境较差;
2.焚烧法:焚烧法是一种传统的方法,使废线缆的塑料皮燃烧,然后其中的铜,但产生的烟气污染极为严重,同时 ,在焚烧过程中铜线的表面严重氧化,降低了金属率,该法已经被各国严格禁止;
3.机械剥皮法:采用线缆剥皮机进行,该法仍需要人工操作,属半机械化,劳动强度大,效率低,而且只适用粗径线缆;
4.化学法:化学法废线缆技术是在上个世纪90年代提出的,一些 曾进行研究,我国在“八五”期间也进行过研究。该法有一个的缺点是产生的废液无法,对环境有较大的影响,故很少采用;
5.冷冻法:该法也是上个世纪九十年代提出的,采用液氮制冷剂,使废线缆在极低的温度下变脆,然后经过破碎和震动,使塑料皮与铜线段分离,我国在“八五”期间也曾经立项研究,但此法的缺点是成本高,难以进行工业化的生产
黑龙江双鸭山废电缆光伏板组件当场结算
其他电缆:长期高价各类控制电缆、补偿电缆、扁平电缆、屏蔽电缆、加热电缆、双绞线电缆、同轴电缆、 、农用、矿用线缆、电梯电缆、光伏电缆、机电用电线电缆、生产用电线电缆、低电感电缆、低噪音电缆、加热电缆、电致发光电线、CMP电缆服务。服务对象包括:电力(供电)公司、钢铁厂、发电厂、热电厂、核电厂、铁合金厂、机关、机场、酒店、矿务局、、公司、公司、建筑工地、施工单位、铁道局、电气化工程公司、地铁、大中型工厂、公司、企、房地产、印刷厂、电气厂、电子厂、变压器厂、电缆厂、关厂、机械厂、修造厂、碳素厂、电碳厂。电缆品牌:长期高价宝胜、鲁能泰山、远东、上上、熊猫、亨通光电、、南缆、普睿司曼、五彩-江南、远东、、红旗、新特、南鼎、奔达康、中天、太阳、昆仑、津成、鸽牌、胜牌、太平洋、宝丰顺通、粤道、通宝、长江、无锡长城、江苏泰祥、文章网牌、江苏大宇、浙江华泰、江苏亚飞、江西圣塔、起帆、兰州众邦、邮江、青岛红日、天津金山、昆山长江、无锡沪众、广州天虹、胜华、嘉兴多角等品牌国产及进口废旧电缆、废旧电线、电线电缆服务。
在抱闸调整工作始前,确保不存在任何的电能和机械能。确保抱闸轮毂和闸瓦不要沾上油脂和润滑剂。制动器闸行程的调整:参考松螺母3和螺钉4。顶杆4必须离抱闸铁芯的螺钉14。顺时针旋转螺钉4至与顶杆螺钉14刚好接触,然后继续顺时针旋转1圈(螺距2mm),推动制动器顶杆,使衔铁向内2mm。相同方法调整另一侧。给制动器通电,此时制动器顶杆从内侧向外的行程为4mm。(若行程小,可顺时针旋转顶杆螺钉4增大行程;反之,逆时针减小行程)。用数组定义数据块的大小数据块的大小与数据块中定义的变量的个数和数据类型有关,如果需要一个容量很大的数据块,可以用数组来定义数据块的大小,如果在数据块中只定义一个数组ARRAR[1..500],数组元素的数据类型为字,则该数据块的大小为100B。可以用地址和任意的简单数据了诶行来方位该数据块中的存储单元。若方位数据块中未定义的地址,将会出现错误信息“读取时发生区域长度错误”。设置数据块参数:鼠标右键点击数据块,选择对象属性,出现如下图所示,具体如何设置参见帮助。个的软元件之间执行成批复位的指令。用于在中断运行后从初期始运行时,以及对控制数据进行复位时。功能和动作说明1.16位运算(ZRST、ZRSTP)将同一种类的D1~D2全部复位。D1,D2为位软元件时D1~D2的软元件范围全部被写入OFF(复位)。D1,D2为字软元件时D1-D2的软元件范围全部被写入K0。注意要点1.软元件时 D1,D2为同一种类的软元件,且D1编号≦D2编号。功能代码:MODBUS设备所支持的功能代码(需要查询设备手册),比如这次使用的MODBUS协议卡支持的功能码如下:01读线圈、03读取保持寄存器、04读输入寄存器、05写单个线圈、06写单个寄存器、15写多个线圈、16写多个寄存器。数据地址:MODBUS设备对应的寄存器地址,查设备手册可知道。CRC校验码:CRC16校验码占用1个字节。PLC侧按照手册上接好线,打模块设置,配置好CH2通道的参数,如图:然后创建一个子程序,先把CH2的错误程序写上,防止通讯错误,影响其他设备通讯,然后向地址写入数据,确定CH2通讯数据长度单位。只要接收器有足够的抗共模干扰能力,就能从干扰信号中识别出驱动器输出的有用信号,从而克服外部干扰的影响。RS-422A在传输速率(10Mb/s)时,允许的通信距离为12m,传输速率为100kb/s时,通信距离为1200m。一台驱动器可以连接10台接收器。RS-422接口属于全双工通信方式,在工业计算机上配备得较多。平衡驱动差 A的变形。RS-422A是全双工,两对平衡差分信号线分别用于发送和接收。
|