|
然后步与步之间的转换条件我们可以设置成各个限位关,然后我们通过移位指令把M101到M107的各个指令一步步。梯形图:当我们在启动前机械手位于原点位置,X5(左限位关),X3(右限位关)是被压合的,就会传输一个1到M100里面去,然后M100的常触点闭合,按下启动按钮X1,M100的数据通过移位指令移到M101里面去,机械手向下运动,当碰到下限位关X2后,M101的数据通过移位指令移到M102里面去,机械手向上运动,当碰到上限位关X3后,M102的数据通过移位指令到M103里面去,机械手向右运动,,,,,,以此类推,一直到M107复位指令。
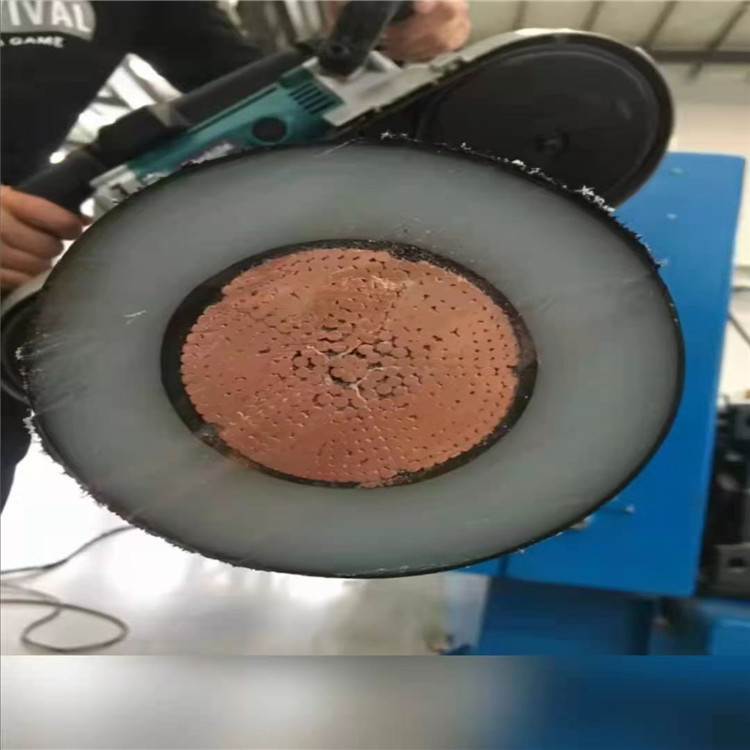
废旧电缆利用方法
1.手工剥皮法:该法采用人工进行剥皮,效率低、成本高,而且工人的操作环境较差;
2.焚烧法:焚烧法是一种传统的方法,使废线缆的塑料皮燃烧,然后其中的铜,但产生的烟气污染极为严重,同时 ,在焚烧过程中铜线的表面严重氧化,降低了金属率,该法已经被各国严格禁止;
3.机械剥皮法:采用线缆剥皮机进行,该法仍需要人工操作,属半机械化,劳动强度大,效率低,而且只适用粗径线缆;
4.化学法:化学法废线缆技术是在上个世纪90年代提出的,一些 曾进行研究,我国在“八五”期间也进行过研究。该法有一个的缺点是产生的废液无法,对环境有较大的影响,故很少采用;
5.冷冻法:该法也是上个世纪九十年代提出的,采用液氮制冷剂,使废线缆在极低的温度下变脆,然后经过破碎和震动,使塑料皮与铜线段分离,我国在“八五”期间也曾经立项研究,但此法的缺点是成本高,难以进行工业化的生产
防水电缆各种报废电缆电线辽宁大连
就会影响整根电缆质量。质量缺陷越是发生在内层,而且没有及时发现终止出产。那么造成的损失就越大。由于电线电缆的出产不同于式的产品,可以拆重装及更换另件;电线电缆的任一部件或工艺过程的质量题目,对这根电缆几乎是无法挽回和弥补的。事后的都是十分消极的,不是锯短就是降级,要么报废整条电缆。它无法拆重装。电线电缆的质量治理,必需贯穿整个出产过程。质量治理分要对整个出产过程巡回检查、操纵人自检、上下工序互检,这是保证产品质量,进步企业经济效益的重要保证和手段。2.出产工艺门类多、物料流量大电线电缆涉及的工艺门类广泛,从有色金属的熔炼和压力,到塑料、橡胶、油漆等化工技术;纤维材料的绕包、编织等的纺织技术。
点击确定后出现硬件组态画面,给PLC设定子网参数,此处使用默认值。然后添加驱动信息,根据下图所示找到使用的驱动型号。此处使用Cu310-2。选好后拖拽到硬件组态中,然后设定总线使用之前PLC创建的PN1。对驱动控制器进行配置,选择矢量类型,标准报文2。在工艺对象目录下点击新增对象,找到运动控制的速度轴对象,添加。速度轴的对话框中可以选择基本参数、硬件接口以及扩展参数。在硬件接口中选择前面硬件组态中添加的Cu310。中间继电器实质上是电压继电器。但它的触点对数多,触头容量较大,动作灵敏。中间继电器的主要用途是:当其它继电器的触头对数或触头容量不够时,便可以借助中间继电器来扩大它们的触头数和触头容量,起到中间转换的作用。下图是JZ7系列的中间继电器的外形结构,大家可以参考一下:上图所示的中间继电器是由静铁芯、动铁芯、线圈、触点系统、反作用簧和复位簧等组成。它的触点对数较多,没有主、辅触点之分。各对触点允许通过的额定电流也是一样的,都为5A。在我们刚一始接触到51单片机的时候对P0口必须加上上拉电阻,否则P0就是高阻态。对这个问题可能感到疑惑,为什么是高阻态?加上拉电阻?今天针对这一概念进行简单讲解。高阻态高阻态这是一个数字电路里常见的术语,指的是电路的一种输出状态,既不是高电平也不是低电平。如果高阻态再输入下 电路的话,对下级电路无任何影响,和没接一样,如果用万用表测的话有可能是高电平也有可能是低电平,随它后面接的东西定。高阻态的实质电路分析时高阻态可路理解,你可以把它看作输出(输入)电阻非常大。但就有没有人能说出电的形状、颜色、大小、重量来,这种看不见、摸不着的概念是抽象的。对于抽象的知识只要理解即可,不需要深究,否则进去了就不容易出来了.比如对于电压、电动势、电位、电流、电阻等,只要了解其概念,知道其单位,掌握测量方法就可以了.至于具体的研究方法、内部结构等,都用处不大,现在就不要学习,等以后有能力时间的时候再去学习。再举个例子,我们电工学的第1章里,有个电理的计算公式R=pl/s告,它可以算出导线的电阻.刚始电工时,笔者认为这个公式很有用,但其实在实际工作中几乎用不到这个公式,笔者已经了三十多年电工,一次都没有用过.在实际的工作中,导体是用它的截面积来表示的.实际的工作中是不问导线电阻的,而是问导线的平方数的,问多少平方的导线能够通过多大的电流等。HMI_2为精智面板HMI_2为精智面板这个连接个数是这个HMI设备所能占用S7-1200的HMI连接个数,可以作为选型参考。目前Sma -1200的HMI面板的其他信息五.硬件版本V3.0支持的协议和的连接资源:3个连接用于操作面板1个连接用于编程设备(PG)与CPU的通信8个连接用于OpenIE(TCP,ISOonTCP,UDP)的编程通信,使用T-block指令来实现3个连接用于S7通信的服务 及S7-400的以太网S7通信8个连接用于S7通 网S7通信连接数是固定不变的,不能自定义。
|