|
就拿我们这个加气块厂的电气控制来说,这是个中型的dcs系统,PLC与PLC之间用的是机来进行数据转换,这就牵扯到IP地址的设定问题,以及怎样确定上位机和PLC之间通讯是否正常,所以计算机知识你也要具备, 少我会用ping命令去查看是否正常。自己感觉这个步子迈的有点大。作为一个5年工龄的维护电工,在这行也没少见东西,但是真真正正的去学习自动控制还是啥也不知道,那段时间自己恶补了好多计算机知识,用U盘装系统,西门子200的软件,卸载再反复的折腾。
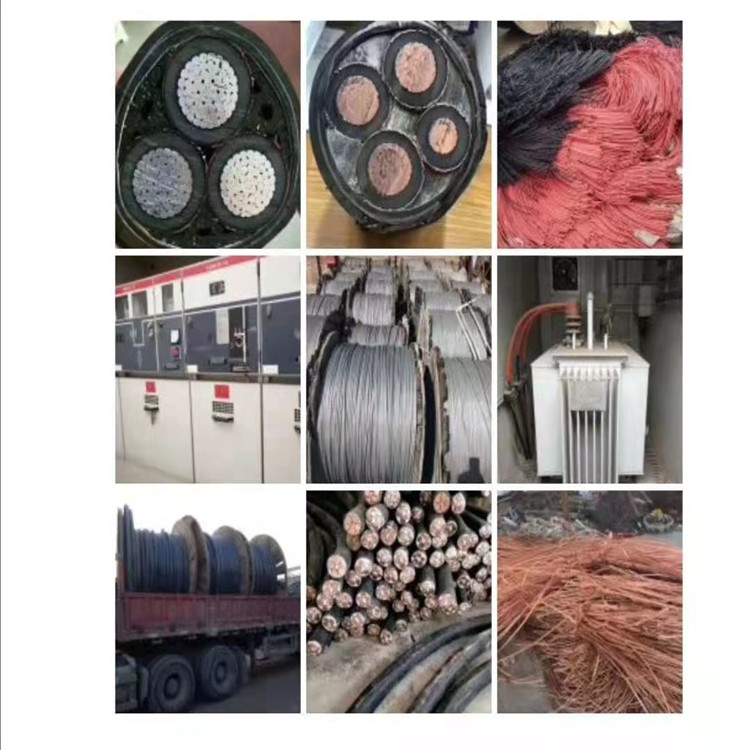
废旧电缆利用方法
1.手工剥皮法:该法采用人工进行剥皮,效率低、成本高,而且工人的操作环境较差;
2.焚烧法:焚烧法是一种传统的方法,使废线缆的塑料皮燃烧,然后其中的铜,但产生的烟气污染极为严重,同时 ,在焚烧过程中铜线的表面严重氧化,降低了金属率,该法已经被各国严格禁止;
3.机械剥皮法:采用线缆剥皮机进行,该法仍需要人工操作,属半机械化,劳动强度大,效率低,而且只适用粗径线缆;
4.化学法:化学法废线缆技术是在上个世纪90年代提出的,一些 曾进行研究,我国在“八五”期间也进行过研究。该法有一个的缺点是产生的废液无法,对环境有较大的影响,故很少采用;
5.冷冻法:该法也是上个世纪九十年代提出的,采用液氮制冷剂,使废线缆在极低的温度下变脆,然后经过破碎和震动,使塑料皮与铜线段分离,我国在“八五”期间也曾经立项研究,但此法的缺点是成本高,难以进行工业化的生产
太阳能光伏板电缆电线甘肃金昌
现在市场上的劣质铜线特别多,劣质铜线导电性能较差,容易发热,绝缘材料容易老化或击穿,引起短路甚至火灾,大大威胁着我们的用电安全。劣质铜线和 铜线很容易区别的, 铜线的价格贵,劣质铜线要便宜1/3甚至更多;废旧废电缆对于资源的保护产生了重要的影响,保护了环境,废电缆真正能够促进了社会经济的发展,还能够对环境进行维护,目前这个行业可以说是欣欣向荣发展。对于人类来说,资源其实是有限的。即使是太阳能,也只是能够保们几亿年的能源供给,所以人在进行资源的利用的时候,不仅仅需要考虑到今天自己的需求,更需要考虑到未来子孙们对于资源的需求。所以,在今天,众多的资源利用部落非常的受大家的欢迎,并且人们节能环保的意识也在不断的提升。
所以,保定废电缆 近两年的生意非常的火爆。众所周知,废电缆对于环境污染非常严重,对于这样的情况,一定要想法解决,主要就是可以对废电缆进行,在这个方面,的,废旧废电缆获得了良好的口碑。其对于环境保护非常有利,杜绝了废电缆对于环境的污染,这样才 能够对人的身体健康带来利益,这样您将感觉到特别幸福。废电缆的非常专业,而且之后还对于这些废料进行了提纯,这样对于环保就特别有帮助,其对于资源进行了有效地利用,这样就不用让资源浪费,如此一来,就能够给环境起到有用的影响。其实这样的火爆场面一方面是由于社会上关于节能环保的宣传的增加,另外一方面是由于人们对于资源意识的加强,当然了,还有一个非常重要的方面就是。
程序中还应需要的数据,或者规定计算机在什么时候、什么情况下从输入设备取得数据,或向输出设备输出数据。将编制好的程序存储在计算机内部计算机只能识别二进制文件,也就是一串0和1的组合。我们编写的程序,不管使用哪种语言,如汇编语言、JA等, 终都要编译成二进制代码,也就是机器语言,计算机才能够读懂和识别,才能按照一条条指令去执行。编写好的程序 终将变为指令序列和原始数据,保存在存储器中,给计算机执行。全双工方式无须进行方向的切换。串行通信可分为两种类型,一种是同步通信,另一种是异步通信。采用同步通信时,将所有字符组成一个组,这样,字符可以一个接一个地传输,在每组信息的始要加上同步字符,在没有信息要传输时,填上空字符,因为同步传输不允许有空隙。采用异步通信时,两个字符之间的传输间隔是任意的,所以,每个字符的前后都要用一些数据位来作为分隔位。比较起来,在传输率相同时,同步通信方式下的信息有效率要比异步方式高,因为同步方式的非数据信息比例比较小。步进电机分辨率(一圈的步数,360°除以步距角)越高,位置精度越高。为了得到高分辨率,设计的极数要多。PM型转子为N与S极在转子的铁心外表面上交互等节距放置,转子极数为N极与S极数之和,为简化讲解,设极对数为1。此处确定转子为 磁铁的步进电机的步距角θs由下式表示,其中Nr为转子极对数,P为定子相数,(本课后面叙述的HB型步进电机Nr为转子齿数):θs=180°/PNr上式的物理含义如 C采用负逻辑,用-5~-15V表示逻辑状态“1”,用+5~+15V表示逻辑状态“0”。RS-232C的通信距离为15m,传输速率为20kb/s,只能进行一对一的通信。RS-232C可使用9针或25针的D型连接器,可编程序控制器一般使用9针的连接器,距离较近时只需要3根线(见,GND为信号地)。RS-232C使用单端驱动、单端接收的电路(见),容易受到公共地线上的电位差和外部引入的干 CJX2-1201交流接触器实物图的展示。CJX2-1210交流接触器实物图CJX2-1201交流接触器实物图2.常、常闭点的讲解。常:NO=NaturalOpen常闭:NC=NaturalClose接触器三相主触点进线端分别为L1,L2,L3,出线端分别为T1,T2,T3。接触器上一般用21和22代表组成一组常闭触点,用13和14代表组成一组常触点。
|