|
同时逐渐钻研和废旧物资的二次与综合应用,完成就地资源化,进一步进步应用程度,为创立适宜社会市场经济特征的再生资源应用体系打下基础。,对于这一轮废品价格的下跌,老王表示并不清楚个中缘由。他称,听说是经济形势不好,也影响了废品价格。
希望低速大转矩制动器的情况。以上情形应考虑使用减速器。步进电机使用的减速器,要求齿隙小、耐冲击、齿面强度高。下面介绍减速器的实用举例:高分辨率的PM型步进电机:下图为35mm直径的带减速器的PM型步进电机外形照片。带减速器的PM型步进电机用于绕线机的,此时相当于前面描述的提髙分辨率的方法。低速大转矩高分辨率的步进电机:步进电机减速器的齿隙要小,因为步进电机用于位置控制的情况多,其位置精度决定了HB型步进电机的步距角1.8°的精度士3%,如减速器的齿隙大于1°就不能使用,因此通常使用平行齿轮或行星齿轮优化设计,可以减小齿隙,下图为复合齿啮合。
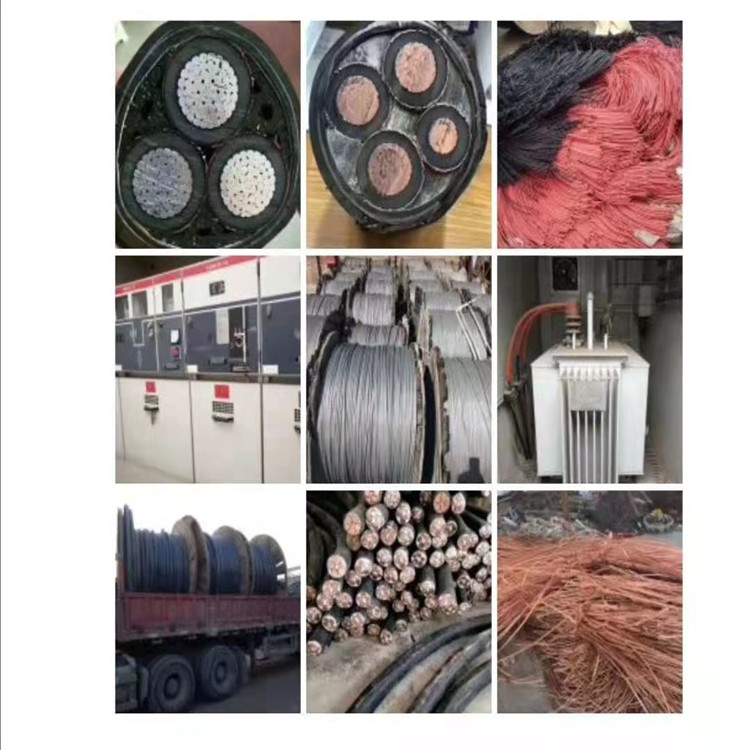
本公司长期面向山 高价各类废旧电缆、废旧电线、电力电缆、通信电缆、船用电缆、矿用电缆、高压电缆、铜电缆、库存电缆等电线电缆产品,欢迎有废旧电缆线的单位及个人洽谈事宜,我们将为您的电线电缆、拆除服务!
通过资源而获得的废电缆材质重新的成本要比采并且进行的成本要低。所以说,保定废旧废电缆才会有如此火爆的生意,并且搞得有声废电缆。通过回得来的废电缆有一部分是产成品。废旧电缆线产品的基本知识介绍线电缆的与大多数机电产品的出产方式是完全不同的。机电产品通常采用将另件装配成部件、多个部件再装配成单台产品,产品以台数或件数计量。电线电缆是以长度为基本计量单位。所有电线电缆都是从导体始,在导体的一层一层地加上绝缘、屏蔽、、成缆、护层等而制成电线电缆产品。产品结构越复杂,叠加的层次就越多。电线电缆产品的工艺特性:1.大长度连续叠加组合出产方式大长度连续叠加组合出产方式,对电线电缆出产的影响是全局性和控制性的。
这涉及和影响到:(1)出产工艺流程和设备布置出产车间的各种设备必需按产品要求的工艺流程公道排放,使各阶段的半成品,顺次流转。设备配置要考虑出产效率不同而进行出产能力的平衡。有的设备可能必需配置两台或多台,才能使出产线的出产能力得以平衡。从而设备的公道选配组合和出产场地的布置,必需根据产品和出产量来平衡综合考虑。(2)出产组织治理出产组织治理必需科学公道、周密正确、严格细致,操纵者必需一丝不苟地按工艺要求执行,任何一个环节泛起题目,都会影响工艺流程的通畅,影响产品的质量和交货。特别是多芯电缆,某一个线对或基本单元长度短了,或者质量泛起题目,则整根电缆就会长度不够,造成报废。反之,如某个单元长渡过长。
则必需锯去造成铺张。(3)质量治理大长度连续叠加组合的出产方式,使出产过程中任何一个环节、瞬时发生一点题目,就会影响整根电缆质量。质量缺陷越是发生在内层,而且没有及时发现终止出产。那么造成的损失就越大。由于电线电缆的出产不同于式的产品,可以拆重装及更换另件;电线电缆的任一部件或工艺过程的质量题目,对这根电缆几乎是无法挽回和弥补的。事后的都是十分消极的,不是锯短就是降级,要么报废整条电缆。它无法拆重装。电线电缆的质量治理,必需贯穿整个出产过程。质量治理分要对整个出产过程巡回检查、操纵人自检、上下工序互检,这是保证产品质量,进步企业经济效益的重要保证和手段。2.出产工艺门类多、物料流量大电线电缆涉及的工艺门类广泛。
举例而言,在操作时由于设备的告诉运转将手套卷入其中,由于时间过短使得手套并没有完全脱离人体,这就会造成相应的事故。在盘车上作业时,一定要佩戴好手套,防止由于盘车轮不稳定而引发的盘车事故。除此之外,当盘车转速太高时,进行松闸操作的工作人员没有及时松手,会使得操作人员的手部受到伤害。如果施工部位在轿厢顶部时,需要穿戴有保护材料的工作鞋,避免由于轿门的启停而造成对脚的伤害。将电梯控制到顶层以后,不能错误的一直按着按钮是它前行,正确的操作就是使用点动的形式控制其缓慢向上,这样的目的就是,避免高速运动的情况下对头部产生伤害。BCD码的低3位各位只能是0~9,如果是16#A~16#F则会出错。计数器的预设值PV是0~999的BCD码,可以用格式为C#的常数(C#1~C#999)作为计数器的预设值。下图用MW42计数器的预设值PV,如果用MOVE指令将十进制数348(对应的十六进制数为16#15C)传送给MW42,进入RUN模式时,操作系统将它转换为BCD码时出错(16#15C不是BCD码),不能切换到RUN模式。输入预设值348时,应改为将C#348传送给MW42,它会自动地变为W#16#348,当然也可以直接输入16#348。在判别出管型和基极b后,可用下列方法来判别集电极和发射极。将万用表拨在R×1K档上。用手将基极与另一管脚捏在一起(注意不要让电极直接相碰),为使测量现象明显,可将手指湿润一下,将红表笔接在与基极捏在一起的管脚上,黑表笔接另一管脚,注意观察万用表指针向右摆动的幅度。然后将两个管脚对调,重复上述测量步骤。比较两次测量中表针向右摆动的幅度,找出摆动幅度大的一次。对PNP型三极管,则将黑表笔接在与基极捏在一起的管脚上,重复上述实验,找出表针摆动幅度大的一次,对于NPN型,黑表笔接的是集电极,红表笔接的是发射极。我之所已这样编写,是为了方便,给大家演示。这个是靠时间实现的。我首先分享第二个编写梯形图:我这样用的是ALT指令,交替输出指令,这个比较简单,在我没有给M10上升沿信号的时候,是Y1是吸合的。这是我给了M10上升沿信号,ALT指令输出,M12线圈吸合,然后Y0线圈吸合,Y1线圈失电。大家是实践中的时候,需要吧M10换成想X10,也就是PLC的输入信号。我在所有的编程梯形图里用的都是上升沿编程指大家在实践中,也可以用梯形图的编程指令中下降沿和常触点。
|