|
电线电缆行业的平均利润只有4.11%,电线电缆行业的利润已经低于中。国电工行业平均利润4.88%。中=国电线电缆行业产值突破一万亿,占全球电线电缆市场份额25%以上。据统计,线缆行业国有及规模以上企业约5000多家,近97%是中小企业,大型企业只有19家,其产品只占 11.7%的市场份额,行业整合已势在必行。电线电缆业内人士认为,对于幅员辽阔、人口众多、经济发展迅速崛起的中=国来说,电线电缆产品的需求量可想而知。电线电缆产品的需求与国民经济的增长速度和人民生活水平的提高密切相关,还与基础性建设的投入量关系更为直接。电线电缆产品是按系统的大小、高低分级分布在设备中,即在一个系统中从高到低、从大容量到小容量都是联结着的。
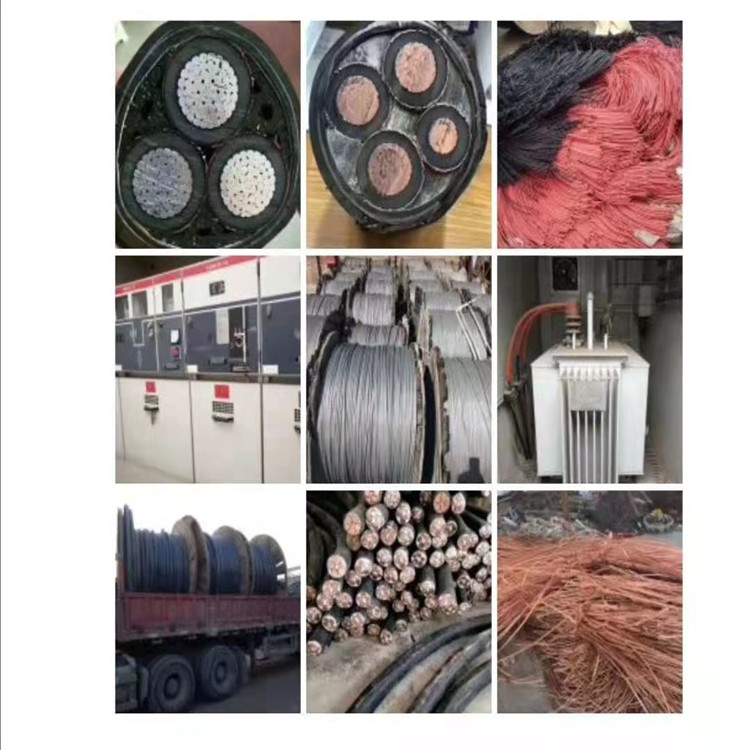
发电电缆内蒙古乌兰察布太阳能光伏板
的业务范围:高价电缆、废铜、有色金属、变压器、废旧结晶器铜管、废旧风口铜、红铜、黄铜、紫铜、铜板、电机、配电柜等含铜设备等业务。我公司具有一定的库存,能长期稳定为附近和周边地区及临近省稳定的货源,质量方面已取得合作厂家的肯定并成为他们的友好商业伙伴,并和 多个省的同行长期合作和交流。宗旨:始终坚持着"诚信经营,公平公正"的
时间继电器的应用,对于我们维修电工从业人员来说,并不陌生。当设备维修过程中或者一些电路的设计中,有时会遇到无对应类型的时间继电器。可以通过改变电路的控制结构,实现不同类型时间继电器的代换。下面举例说明如何完成通电延时继电器到断电延时继电器的转换。图㈠为一个断电延时继电器电路。当关k1(或者继电器的一组触点)闭合时,断电延时继电器KT1的线圈得电,它的延时断常触点瞬时闭合,继电器kA得电。当K1断时,KT1线圈失电,经过设定的时间,其延时断常闭触头才断,继电器KA失电释放。如果你想画一个“引脚上负下正”模式的运放符号就非常方便。若是没有等效符号,如果你想垂直翻转一个元件,也会把正电源放到下边,把地放到上边去。通过调用绘制的德摩根等效符号,你可以输入引脚,同时保持电源和地的位置不变。解决这个问题的另外一种方法是一个具有独立电源的异构元件(U6)。现在你可以垂直翻转运放,将负引脚放到上面来。某个年代的原理图程序出现于这样一个时期:PCB上大约有40个14引脚的逻辑芯片,每个芯片配一个去耦电容,再加上一个卡缘连接器。如果现在有个项目,需要MODBUS控制五个变频器,那该怎么?也许你会说,这还不简单,把前面的通信程序复制五遍不就行了?理论上,这是可行的,但却是不可行的,为什么呢?因为串口在同一时间,只能进行一次数据交互。这个一次,是指一次读或是写操作。这就好比一个很窄的路口,一次只能通过一辆汽车,如果五辆汽车一起通过,势必会引起堵塞,一辆也过不去,但我们需要过五辆怎么?那就需要交通灯或是交指挥交通,通信也一样,也需要有交通灯或是交,而在MODBUS通信中,就需要我们自己来当交,通过程序控制通信流程,这就是轮询方式。步进电机的位置控制与速度控制可根据上节的原理按如下操作进行:步进电机的位置控制依指令脉冲的总数而定。步进电机的速度与指令频率的pps成正比。由指令脉冲可以进行位置和速度控制,不需反馈电路即环控制。DC电机或无刷电机要作位置控制和速度控制时,转子的位置或速度的信号必须反馈给控制器,即要加反馈传感器,如下图所示的闭环控制系统才可以实现。相对的,如下图所示的环控制不必特别在转子上加装位置或速度传感器电路,包含驱动电路的步进电机的整体费用一般比较便宜。
|