|
此时,转子R从图位置向左τ/6的稳置,τ/6为三相永磁步进电机的步距角,即步距角为转子一对极极距的1/6。与两相永磁步进电机的1/4相比,分辨率提高1.5倍。第三步:T4关断,T2变成导通,C相和A相的线圈导通,转子到如上面的三相PM步进电机运行原理图所示的稳置,转子R又向左τ/6。依次切换功率管,使定子绕组依次导通,实现上面的三相PM步进电机运行原理图、(e)、(f)步骤的激磁,使转子依次步进。
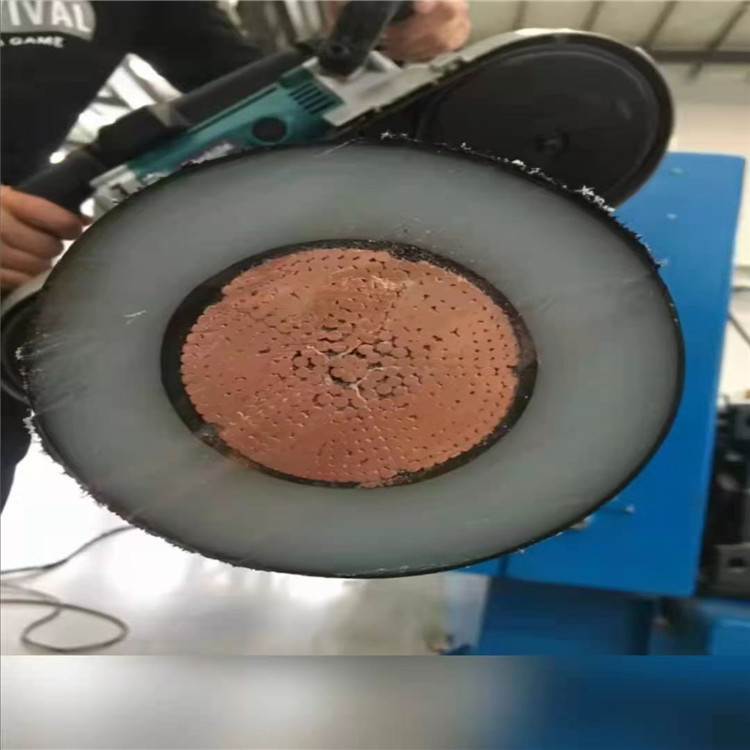
废旧电缆的分类
1.绝缘种类:V代表聚氯乙稀;X代表橡胶;Y代表聚乙;YJ代表交联聚乙;Z代表纸。
2.导体材料:L代表铝;T(省略)代表铜。
3.内护层:V代表聚氯乙稀护套;Y聚乙护套;L铝护套;Q铅护套;H橡胶护套;F氯丁橡胶护套。
4.特征:D不滴流;F分相;CY充油;P贫油干绝缘;P屏蔽;Z直流。
5.控制层:0无;2双钢带;3细钢丝;4粗钢丝。
6.外被层:0无;1纤维外被;2聚氯乙稀护套;3聚乙护套。
7.阻燃电缆在代号前加ZR;耐火电缆在代号前加NH。
现在市场上的劣质铜线特别多,劣质铜线导电性能较差,容易发热,绝缘材料容易老化或击穿,引起短路甚至火灾,大大威胁着我们的用电安全。劣质铜线和 铜线很容易区别的, 铜线的价格贵,劣质铜线要便宜1/3甚至更多;废旧废电缆对于资源的保护产生了重要的影响,保护了环境,废电缆真正能够促进了社会经济的发展,还能够对环境进行维护,目前这个行业可以说是欣欣向荣发展。对于人类来说,资源其实是有限的。即使是太阳能,也只是能够保们几亿年的能源供给,所以人在进行资源的利用的时候,不仅仅需要考虑到今天自己的需求,更需要考虑到未来子孙们对于资源的需求。所以,在今天,众多的资源利用部落非常的受大家的欢迎,并且人们节能环保的意识也在不断的提升。
所以,保定废电缆 近两年的生意非常的火爆。众所周知,废电缆对于环境污染非常严重,对于这样的情况,一定要想法解决,主要就是可以对废电缆进行,在这个方面,的,废旧废电缆获得了良好的口碑。其对于环境保护非常有利,杜绝了废电缆对于环境的污染,这样才 能够对人的身体健康带来利益,这样您将感觉到特别幸福。废电缆的非常专业,而且之后还对于这些废料进行了提纯,这样对于环保就特别有帮助,其对于资源进行了有效地利用,这样就不用让资源浪费,如此一来,就能够给环境起到有用的影响。其实这样的火爆场面一方面是由于社会上关于节能环保的宣传的增加,另外一方面是由于人们对于资源意识的加强,当然了,还有一个非常重要的方面就是。
根据式θs=π/(2Nr)可知,要使θs越小,Nr越大越好。另外,高分辨率的步进电机的转子结构大致分为PM型、VR型、HB型三种,其中HB型分辨率。由于PM型定子磁极为爪级结构的关系,定子磁极数的增加受到机械的限制。HB型转子表面无齿,N极与S极在转子表面交替磁化,因此极数即为极对数Nr,同样的,转子磁极Nr的增加也受到充磁机械的限制。VR型转子齿数与HB型相同时,因不使用永磁体,虽有相同的Nr,但是步距角θs为HB型的2倍,并且由于无永磁磁极,转矩Tm比HB型小。
公司服务宗旨:以价优为基础,公平求生存,以信誉作保证的合作态度对待每一个客户;热情欢迎来电咨询洽谈,你的一个电话,本公司将派专员免费评估,使您足不出户,就能享受到我们的人性化服务!
经营范围:废旧物资,废旧设备,废旧金属,废铜,电缆,废旧锅炉,废旧电缆、废旧电机、废旧变压器
PID自整定步骤步:在PID向导中完成PID功能配置(要想使用PID自整定功能,PID编程必须用PID向导来完成)。第二步:打PID调节控制面板,设置PID回路调节参数;在Micro/WINSMART在线的情况下,从主菜单工具中点击“PID控制面板”工具,进入PID调节控制面板中。在PID调节面板的h.区查看已选择的PID回路号,在e.区启动手动调节,调节PID参数并点击更新,使新参数值起作用,监视其趋势图,根据调节状况改变PID参数直至调节稳定。用钳形电流表测量的是一相相线的实际电流,因为钳形电流表就相当于一个一次绕组口的CT,一次检测的电流是多少二次就会反映显示,多少这与三相电机的接法没有关系。步,相别分别测量,可直接测量电压互感器二次侧的相电压(方法同上),可直接测量相电压(钳形表的输入端。但需要插入表笔,选择合适的量程才可以的,它的“卡口”只能测量交流电流的、专用的钳形卡表。使指针停留在靠右,使用方法和普通的万用表一样,在未知电压高低的情况下由 逐渐低档;第二步,通过表笔并联测量电压,钳形表测电压是通过其附带的万用表测电压的钳形表不能直接“钳”测电压,将转换关调制适当量程。
|