|
S7-1200,采集的是0-5V的模拟量信号,对应的压力是-5WC到5WC,因为是次使用,而我在测试的过程中并没有发现问题,所以贴出来,如果大家发现错误,希望指导下。上面的图,是我 早使用的模拟量采集方式,电流信号是4到20mA的,转换的频率是0-50H 面有频率转换,我就没有贴出来了。这两个是欧姆龙CJ1M模拟量采集的图片,如果看到熟悉,可能会发现我之前写的一个PID调节中,有用到这个图,因为PID调节,是肯定需要模拟量采集的,所以我就又把这个图放在这里了,欧姆龙模拟量采集需要设置的地方会多点,在硬件模块中都需要设置好,当然三个PLC中涉及到接线也是,这里都要看下原本说明书中的介绍接线的内容,不要将线接错,先写这些吧,本来表达能力就不行,有点啰嗦了,希望大家见谅啊。
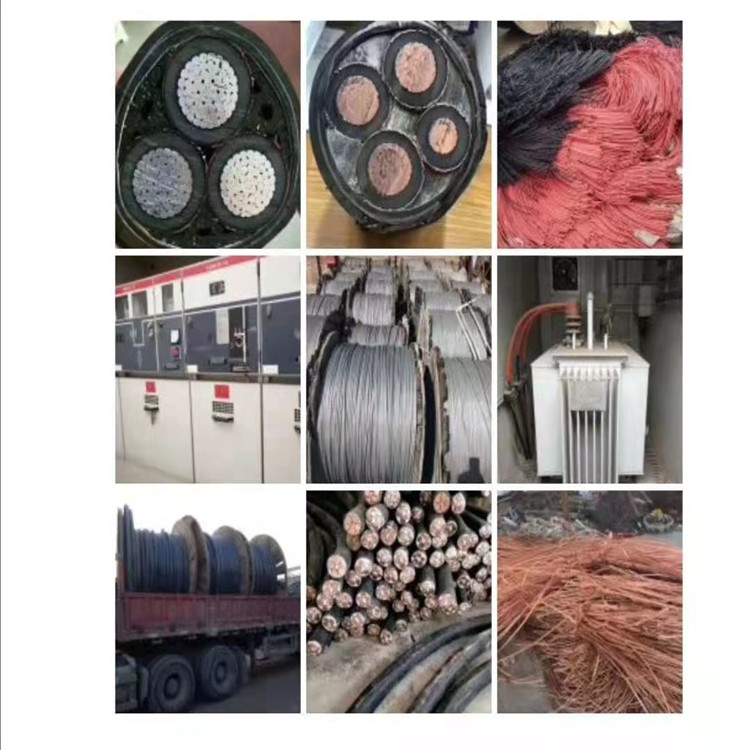
废旧电缆的分类
1.绝缘种类:V代表聚氯乙稀;X代表橡胶;Y代表聚乙;YJ代表交联聚乙;Z代表纸。
2.导体材料:L代表铝;T(省略)代表铜。
3.内护层:V代表聚氯乙稀护套;Y聚乙护套;L铝护套;Q铅护套;H橡胶护套;F氯丁橡胶护套。
4.特征:D不滴流;F分相;CY充油;P贫油干绝缘;P屏蔽;Z直流。
5.控制层:0无;2双钢带;3细钢丝;4粗钢丝。
6.外被层:0无;1纤维外被;2聚氯乙稀护套;3聚乙护套。
7.阻燃电缆在代号前加ZR;耐火电缆在代号前加NH。
一旦任何一处出现故障就会影响全系统。目前,中=国电线电缆行业规模在快速中提高,在粗放中发展,在非理性中扩张。而技术进步和产品升级较慢,重复建设十分严重,导致整个行业产能严重过剩,大部分企业在中、低端市场血拼、混战, 市场、 可以失守,冒,劣泛滥成灾,利润微薄。电线电缆行业曾经因产品质量低劣、诚信缺失等乱象,导致行业质量合格率一度曾徘徊在很低水平,不断出现惨痛的血的教训。另外,电线电缆产业还面临集中度不高等问题。中=国电线电缆行业成为全球惟一没有国=际 可以的可以大国,这真实反应了中=国电线电缆行业在全球所处的发展阶段。我国电线电缆行业总产值和规模跃居世=界 ,并不令人惊奇,而是理应如此。
plc步进指令的编程技巧运用步进指令编写顺序控制程序时,首先应确定整个控制系统的流程,然后将复杂的任务或过程成若干个工序(状态), 弄清各工序成立的条件、工序转移的条件和转移的方向,这样就可画出顺序功能图。根据控制要求,采用STL、RET指令的步进顺序控制可以有多种方式。如所示是单流程顺序功能图,图中M8002是特殊辅助继电器,仅在运行始时瞬间接通,产生初始脉冲。如所示是选择性分支与汇合状态转移方式。
公司服务宗旨:以价优为基础,公平求生存,以信誉作保证的合作态度对待每一个客户;热情欢迎来电咨询洽谈,你的一个电话,本公司将派专员免费评估,使您足不出户,就能享受到我们的人性化服务!
经营范围:废旧物资,废旧设备,废旧金属,废铜,电缆,废旧锅炉,废旧电缆、废旧电机、废旧变压器
Tg为电机所带负载转矩的下限值,(Th—Tg)/Th为转矩波动的相对误差,相数越多,此值越小,对降低振动越有利。亦即,相数越多,电机产生的转矩波动幅值越小,频率越高,产生的振动越小(有关说明在后面章节)。高转速多相步进电机的优点是能高速响应。步进电机为同步电机,绕组电流频率与转子速度成正比例,若电机高速运转,则绕组电流角频率ω增加,使绕组电感L产生的电抗ωL加大,从而降低电流,致使转矩下降。当用数千pps驱动步进电机时,电机绕组阻抗Z与直流电阻相比,电抗ωL将大幅增加。如果外部常按钮按下,Q0.1就没有输出,因为I0.5不通了(注意,虽然程序内常闭触点I0.5中间有个斜杠,但那只是表示它是一个常闭触点,并不表示它是通的)。这个虽然不太容易理解,但多看几遍就能明白。,是程序内常闭触点的另一种用法,如果外部接的是常闭按钮,当没有按下时,I0.5是不通的,所以Q0.1就没有有输出。如果外部常闭按钮按下,Q0.1就有输出,因为I0.5通了。这个也有点难度。但是我告诉大家一句话基本上你就能明白的差不多了,程序内的常触点,给它信号它就接通。
|