|
控制器主要由指令寄存器、 、程序计数器、操作控制器等组成。存储器存储器是计算机记忆或暂存数据的部件。存储器分为内存储器(内存)和外存储器(外存)两种。输入设备输入设备是给计算机输入信息的设备,负责将输入的信息(包括数据和指令)转换成计算机能识别的二进制代码,送入存储器保存输出设备输出设备是输出计算机结果的设备,大多数情况下,它将这些结果转换成便于人们识别的形式。输入设备和输出设备常常被简称为I/O设备。
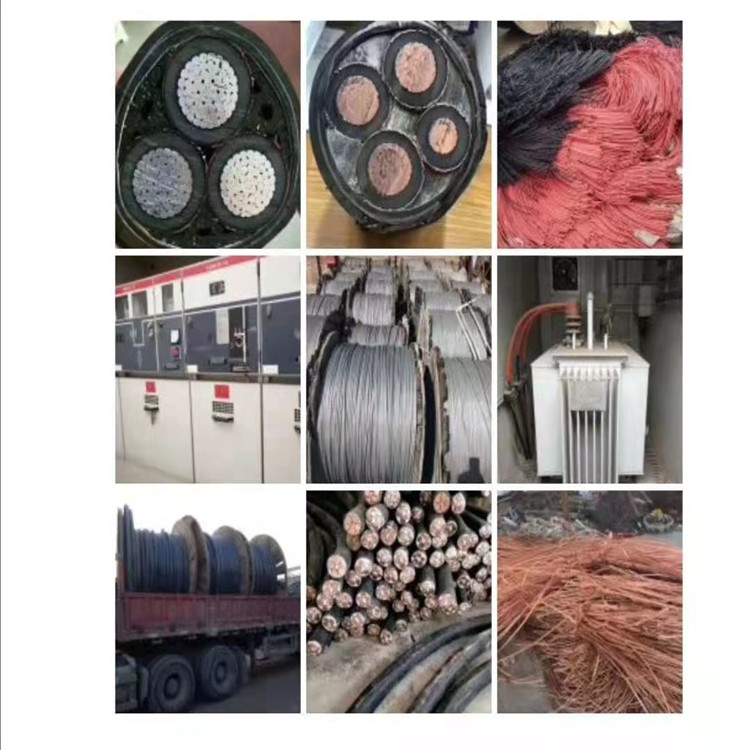
废旧电缆利用方法
1.手工剥皮法:该法采用人工进行剥皮,效率低、成本高,而且工人的操作环境较差;
2.焚烧法:焚烧法是一种传统的方法,使废线缆的塑料皮燃烧,然后其中的铜,但产生的烟气污染极为严重,同时 ,在焚烧过程中铜线的表面严重氧化,降低了金属率,该法已经被各国严格禁止;
3.机械剥皮法:采用线缆剥皮机进行,该法仍需要人工操作,属半机械化,劳动强度大,效率低,而且只适用粗径线缆;
4.化学法:化学法废线缆技术是在上个世纪90年代提出的,一些 曾进行研究,我国在“八五”期间也进行过研究。该法有一个的缺点是产生的废液无法,对环境有较大的影响,故很少采用;
5.冷冻法:该法也是上个世纪九十年代提出的,采用液氮制冷剂,使废线缆在极低的温度下变脆,然后经过破碎和震动,使塑料皮与铜线段分离,我国在“八五”期间也曾经立项研究,但此法的缺点是成本高,难以进行工业化的生产
光伏电缆积压电缆河北张家口
其他电缆:长期高价各类控制电缆、补偿电缆、扁平电缆、屏蔽电缆、加热电缆、双绞线电缆、同轴电缆、 、农用、矿用线缆、电梯电缆、光伏电缆、机电用电线电缆、生产用电线电缆、低电感电缆、低噪音电缆、加热电缆、电致发光电线、CMP电缆服务。服务对象包括:电力(供电)公司、钢铁厂、发电厂、热电厂、核电厂、铁合金厂、机关、机场、酒店、矿务局、、公司、公司、建筑工地、施工单位、铁道局、电气化工程公司、地铁、大中型工厂、公司、企、房地产、印刷厂、电气厂、电子厂、变压器厂、电缆厂、关厂、机械厂、修造厂、碳素厂、电碳厂。电缆品牌:长期高价宝胜、鲁能泰山、远东、上上、熊猫、亨通光电、、南缆、普睿司曼、五彩-江南、远东、、红旗、新特、南鼎、奔达康、中天、太阳、昆仑、津成、鸽牌、胜牌、太平洋、宝丰顺通、粤道、通宝、长江、无锡长城、江苏泰祥、文章网牌、江苏大宇、浙江华泰、江苏亚飞、江西圣塔、起帆、兰州众邦、邮江、青岛红日、天津金山、昆山长江、无锡沪众、广州天虹、胜华、嘉兴多角等品牌国产及进口废旧电缆、废旧电线、电线电缆服务。
制动器主要零部件组成与功能:电梯制动器组成参考的标注,1-调整螺母,调整其位置可控制制动器体内部衔铁始终处于合适的位置,保持合理的工作行程,避免合闸时冲击衔铁,撞击手动闸凸轮,发出噪声;4-控制闸力的行程,在闸间隙形成的条件下,控制制动臂的行程及制动闸瓦与制动轮的工作间隙;5-压缩簧,调整其压缩量可控制制动力的大小,压缩量过大会导致制动体闸困难;7-压缩螺母,调整其位置,可控制制动力的大小;9-顶杆螺钉,控制闸瓦与制动轮的吻合程度,(制动闸瓦与制动轮吻合越好,在相对条件下,形成的制动力越大,工作噪音越小);13-拉杆,决动力的形成,控制闸间隙;10-锁紧螺母,防止在调整完成后,系统动作后各调整螺钉松动,致使系统改变;17-标尺,只是系统在恢复原制动力的参考标记。根据所设数值与公式可以算出,电容电压的变化速率为1V/mS。这表示可以用5mS的时间获得5V的电容电压变化;换句话说,已知Vc变化了2V,可推算出,经历了2mS的时间历程。当然在这个关系式中的C和I也都可以是变量或参考量。详细情况可参考相关的教材看看。供参考。首先设电容器极板在t时刻的电荷量为q,极板间的电压为u.,根据回路电压方程可得:U-u=IR(I表示电流),又因为u=q/C,I=dq/dt(这儿的d表示微分哦),代入后得到:U-q/C=R*dq/dt,也就是Rdq/(U-q/C)=dt,然后两边求不定积分,并利用初始条件:t=0,q=0就得到q=CU1-e-t/(RC)这就是电容器极板上的电荷随时间t的变化关系函数。本文介绍西门子s7-200plc的置位与复位,这两个位操作的指令在我们的程序编写中,作用也是很大,它能完成一些,常规常常闭触点编程无法完成的程序,可以使我们编写的PLC程序条理更加清晰,步骤更加简单。它们两个在每次使用时99%的情况下都是成对出现的,只要我们在程序一个地方使用了置位,在程序的另一个地方就会用到复位。所以永远都是你等着我,我等着你,只要你要不来我就不老。置位与复位的大体意思就是,置位是对一个位写1(有输出),复位就是写0(没有输出)。所谓星三角降压启动是指启动时,先把三相鼠笼式异步电动机定子三相绕组星形链接,等电动机转速升高到一定值后再改成三角形。因此这种降压启动方法只能用于正常运行时坐三角形接法的电动机上。其原理线路图如下图所示。鼠笼式电动机星三角降压启动原理线路图电机启动时将星三角(Y-△)转换关的手柄S2置于启动位置,则电动机定子三相绕组的末端UVW2连成一个公共点,三相电源LLL3经关S1向电动机定子三相绕组的首端UVW1供电,电动机以星形接法启动。我们的原则是只在大功率插座回路和主回路使用2P关,其余关均选择1P+N——不选择1P关,是因为1P关与1P+N关的宽度相同,价格差不了太多。而使用1P关时需要单独配备零排,施工麻烦。而且这样的零线不能切断,有一定的危险性。确定关功能家用关的功能也是三种:无附件(只有短路保护和过载保护功能)、漏电保护附件(增加漏电保护功能)、过欠压脱扣附件(增加过欠压断电功能)。其中主关建议使用过欠压脱扣器——建议使用自复位过欠压脱扣器,断电后可以自行合闸。
|