|
执行菜单命令视图-数据视图,切换到数据视图方式,将显示数组和结构中个元素的初始值和实际值如下图所示访问数组中的数据:” ”.press[2,1]。其中 是数据块DB3的符号名,press是数组名称,它们用英语的句号分。方括号中的是数组元素的下表,该元素是数组的第4个元素如下图。用数组传递参数,如果在块的变量声明表中声明形参的类型为ARRAY,可以将整个数组作为参数来传递,在调用块时可以将每个数组元素赋值给统一数据类型的参数,如下图。
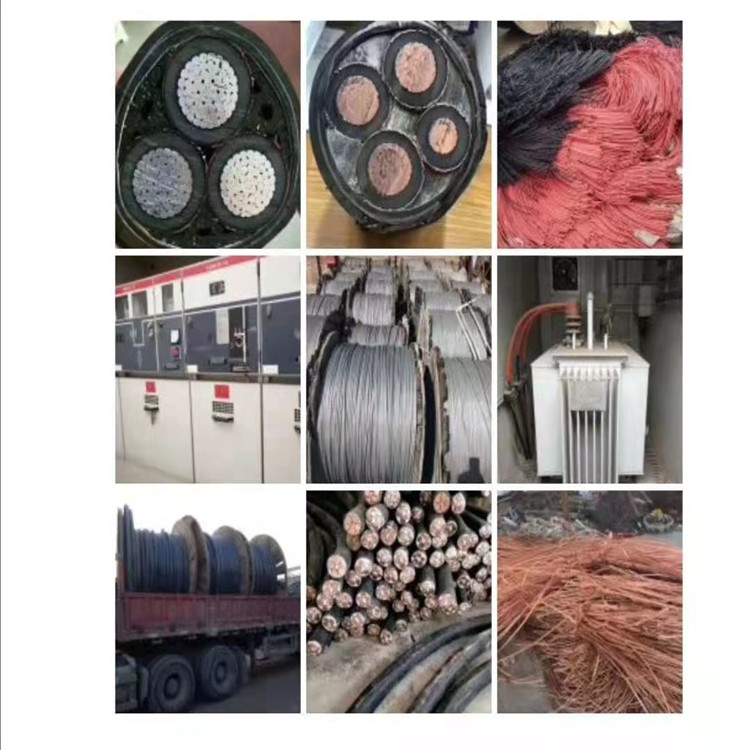
废旧电缆的分类
1.绝缘种类:V代表聚氯乙稀;X代表橡胶;Y代表聚乙;YJ代表交联聚乙;Z代表纸。
2.导体材料:L代表铝;T(省略)代表铜。
3.内护层:V代表聚氯乙稀护套;Y聚乙护套;L铝护套;Q铅护套;H橡胶护套;F氯丁橡胶护套。
4.特征:D不滴流;F分相;CY充油;P贫油干绝缘;P屏蔽;Z直流。
5.控制层:0无;2双钢带;3细钢丝;4粗钢丝。
6.外被层:0无;1纤维外被;2聚氯乙稀护套;3聚乙护套。
7.阻燃电缆在代号前加ZR;耐火电缆在代号前加NH。
现今的首要问题是,如何规范该产业的管理、提高产品质量,使产业顺利地转型升级,获得健康的发展,并逐步打造出华东市展华再生资源公司的 企业和世=界 可以,而不需要再由部门联合进行强制性的整治行业行为。我国的电线电缆工业“大而不强”的现状仍然是产业结构的主要矛盾,“ 产品供不应求,低端产品供过于求”的局面还没有得到根本的改变。我国只有30%的线缆品种达到国=际市场能接受和可参与竞争的水平,还有70%的产品急需提高产品水平和档次,特别是还不能与电缆跨国公司相抗衡。我国的电线电缆行业有着巨大的发展潜力,而如果要想把这种潜力完全发挥出来,产品的科技含量就需要大幅提高。由于b2b的影响阻挡了电线电缆行业的高速增长。
步进电机驱动负载可以按希望的速度起动,若驱动速度超过自身起动脉冲频率时,此速度下则不能起动。只有比电机起动脉冲频率低的速度指令才能起动。采取加速的方法使速度线性增加到所希望的速度,此种方法称为慢速加速驱动。下图表示步进电机的加速与速度-转矩特性。步进电机的速度-转矩特性有失步转矩(同步失步转矩)与牵入转矩(同步牵入转矩)。现在,负载转矩TL的负载要用频率f2驱动时,则自身起动脉冲频率应不大于频率f2的数值。
公司服务宗旨:以价优为基础,公平求生存,以信誉作保证的合作态度对待每一个客户;热情欢迎来电咨询洽谈,你的一个电话,本公司将派专员免费评估,使您足不出户,就能享受到我们的人性化服务!
经营范围:废旧物资,废旧设备,废旧金属,废铜,电缆,废旧锅炉,废旧电缆、废旧电机、废旧变压器
它们还能通过定时器链接功能与 控制定时器共同工作,同步或事件链接功能。在调试模式下,计数器可以被冻结。任一标准定时器都能用于产生:PWM输出。每个定时器都有独立的DMA请求机制。这些定时器还能够增量编码器的信号,也能1至3个霍尔传感器的数字输出。4)基本定时器-TlM6和TIM7这2个定时器主要是用于产生:DAC触发信号,也可当成通用的16位时基计数器。独立看门独立的看门是基于一个12位的递减计数器和一个8位的预分频器,它由一个内部独立的40kHz的RC振荡器时钟;因为这个RC振荡器独立于主时钟,所以它可运行于停机和待机模式。不输出CLR信号。此外,此时的减速时间使用加减速时间(BFM#15)或减速时间(BFM#52)。正转限位/反转限位动作后的重启动方法运行过程中位于运行方向的正转限位/反转限位置为ON后,出现正转限位和反转限位错误(错误代码:K6),无法向已置为ON的正转限位/反转限位的方向。可通过反方向的JOG运行避极限。此时,正转限位和反转限位错误也将复位。此外,错误复位后还可以通过正转限位/反转限位和相反方向的运行避极限。
|