|
程序 终进入while;里纠缠去了,这个到好解释。现将while;语句屏蔽掉。我还以为程序不能被正确执行了呢,因为退出了main主函数,就像Render需要循环来实现一样(尽管刚刚闪灯的程序不在循环之内,但我还是不由产生了这一错觉)。程序执行的结果是:灯不停的闪烁!看到这个现象后的猜想及动作^-^:这块板坏了吧!(在带操作系统如linux字符界面下运行一个不带死循环的C语言文件完毕后就会返回到linuxshell程序中)。
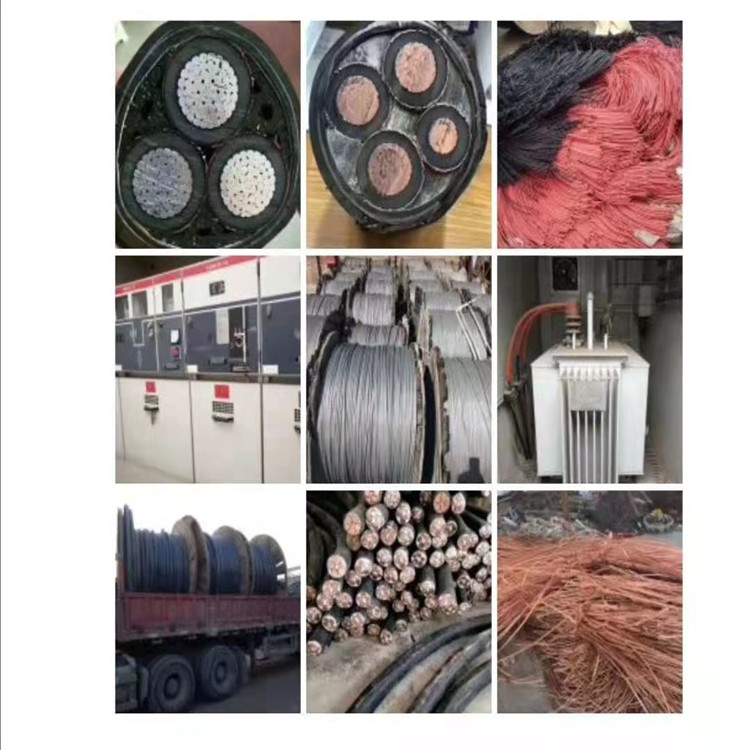
废旧电缆利用方法
1.手工剥皮法:该法采用人工进行剥皮,效率低、成本高,而且工人的操作环境较差;
2.焚烧法:焚烧法是一种传统的方法,使废线缆的塑料皮燃烧,然后其中的铜,但产生的烟气污染极为严重,同时 ,在焚烧过程中铜线的表面严重氧化,降低了金属率,该法已经被各国严格禁止;
3.机械剥皮法:采用线缆剥皮机进行,该法仍需要人工操作,属半机械化,劳动强度大,效率低,而且只适用粗径线缆;
4.化学法:化学法废线缆技术是在上个世纪90年代提出的,一些 曾进行研究,我国在“八五”期间也进行过研究。该法有一个的缺点是产生的废液无法,对环境有较大的影响,故很少采用;
5.冷冻法:该法也是上个世纪九十年代提出的,采用液氮制冷剂,使废线缆在极低的温度下变脆,然后经过破碎和震动,使塑料皮与铜线段分离,我国在“八五”期间也曾经立项研究,但此法的缺点是成本高,难以进行工业化的生产
甘肃金昌二手电缆当场结算
明确各部门的任务和具体承担的责任,杜绝在体系建设中遇到问题相互推诿的现象;同时为保证再生资源体系建设行业的健康发展,必须坚持建设与管理并重,逐步形成引导支持、企业投入、市场运作、社会参与的发展机制。与此同时,加快社区废旧物资网络的建设步伐同样刻不容缓。根据废旧物资生成和特点,积极倡导建立社区废旧物资分类制度及配套措施,可以采取在特别地区试点的法,取得实效后逐步推广,争取较快形成 范围的社会化体系。另外,还要不断加大利用重要性的宣传力度。通过宣传,让大家树立节约资源、保护环境、变废为宝的意识,积极参与再生资源利用活动,尤其是要树立市民自觉利用再生品,愿意承担部分废旧物资利用成本的意识。
设定完参数点击OK键回到PID调节控制面板的主画面第四步:在手动将PID调节到稳定状态后,即过程值与设定值接近,且输出没有不规律的变化,并处于控制范围中心附近。此时可点击e.区内的启动按钮启动PID自整定功能,这时按钮变为停止。这时只需耐心等待,系统完成自整定后会自动将计算出的PID参数显示在e.区。当按钮再次变为启动时,表示系统已经完成了PID自整定。注意:要使用自整定功能,必须保证PID回路处于自动模式。plc步进指令的编程技巧运用步进指令编写顺序控制程序时,首先应确定整个控制系统的流程,然后将复杂的任务或过程成若干个工序(状态), 弄清各工序成立的条件、工序转移的条件和转移的方向,这样就可画出顺序功能图。根据控制要求,采用STL、RET指令的步进顺序控制可以有多种方式。如所示是单流程顺序功能图,图中M8002是特殊辅助继电器,仅在运行始时瞬间接通,产生初始脉冲。如所示是选择性分支与汇合状态转移方式。但要考虑到实时查看监控的带宽,每个连接占用4M,一条1000M的链路可以支持250个摄像头被调试调用。每台接入机接24个摄像头,250/24,相当于网络可以承受每个摄像头同时有10位用户在实时查看的压力。核心机核心机,需要考虑容量以及到汇聚的链路带宽,因为存储是放置在汇聚层的,所以核心机没有录像的压力,即只要考虑同时多少人看多少路即可。设该案例内,同时有10人监看,每人看16路,即容量需要大于10*16*4=640M。如HB型步进电机为P相,转子齿数则依据式θs=180°/PNr可知其步距角久为θs=180°/PNr。此时,定子1相主极数(A“杠A”相的总和)为m个,均匀配置,其内径配置的多个细齿齿数相同。转子 磁铁产生磁通的磁路如下图中的虚线所示,在A“杠A”间形成闭合磁路。与后面叙述的三相HB和五相HB型等奇数相不完全相同,在A“杠A”间不能形成闭合磁路,需要跨接到B相、C相等其他相形成闭合磁路。前者被称为相内磁路式,后者称为相间磁路式。项目“弱电”一般是以“项目”或“工程项目”形式体现的,大到 重点项目,小到智能家居项目。子项有些项目中虽然软件部分的份额比较大,但硬件系统工程部分仍属“弱电”范畴。过程项目是一个整体的过程,一般需要五个过程(环节),在具体项目中也表现为前期、中期、后期三个阶段,同时每个项目都有生命周期。“弱电”可以称之为一个泛行业虽说没有明确“弱电行业”,但是民间已经逐渐把“弱电”看成是一个行业,只是概念比较模糊,我们暂且可以把“弱电”称之为一个泛行业,就是以“弱电”工程项目实施为主的电子智能工程行业。
|