|
可。模拟量控制包括:反馈控制、前馈控制、比例控制、模糊控制等。这些都是PLC内部数字量的计算过程。脉冲量是其取值总是不断的在0(低电平)和1(高电平)之间交替变化的数字量。每秒钟脉冲交替变化的次数称为频率。PLC脉冲量的控制目的主要是位置控制、运动控制、轨迹控制等。:脉冲数在角度控制中的应用。步进电机驱动器的细分是每圈10000,要求步进电机旋转90度。
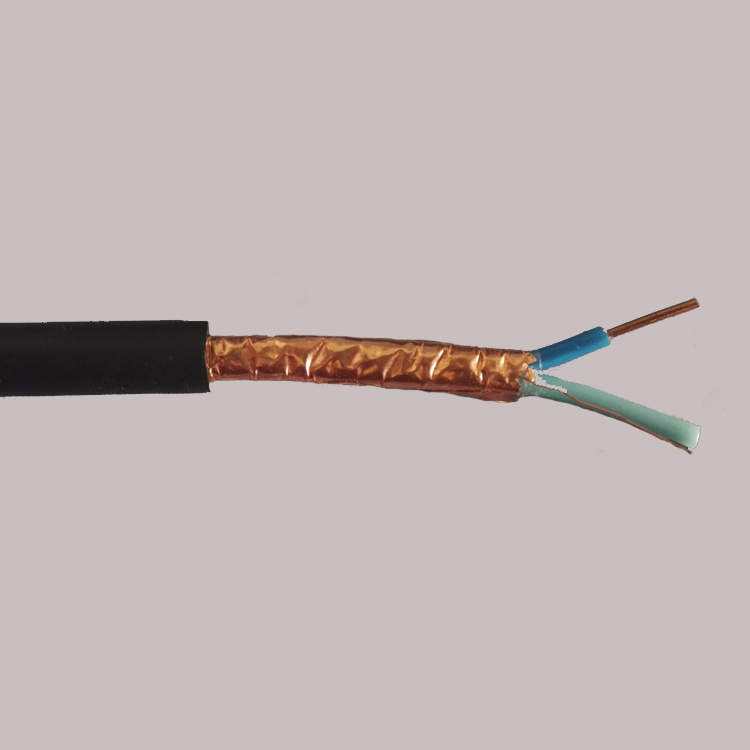
铜仁双屏蔽铠装网线STPSTA-4*2*0.5铜仁CPEV通信电缆产品介绍
用途:
CPEV绞式聚乙绝缘聚氯乙护套市内通信电缆适用于本地网的城市与乡镇线路,也适用于接入公用网的专用网线路。在-30℃~70℃的环境条件下,电缆的机械和电气性能保持不变。
结构:
铜仁双屏蔽铠装网线STPSTA-4*2*0.5铜仁导线 (mm)。
< 6,29.5(Ω/km)
工作电容:52±4PF/km
绝缘电阻:大于10000MΩ.km
铜仁双屏蔽铠装网线STPSTA-4*2*0.5铜仁绝缘材料:高密度聚乙,按照全色谱标准标明绝缘线的颜色。
绝缘线对:把二根不同颜色的绝缘线按不同的节距扭绞成对,并采用规定的色谱组合以便识别线对。
缆芯结构:以25对为基本单位,超过25对的电缆按单位组合,每个单位用规定色谱的单位扎带绕扎,以便识别不同的单位。100对及以上线对的电缆加有1%的预备线对,但 多不超过6对。
缆芯包带:用聚脂薄膜带绕包。
屏蔽:采用绕包铝箔。
护套:聚氯乙稀。可各种颜色
铜仁双屏蔽铠装网线STPSTA-4*2*0.5铜仁识别和长度标记:电缆外表面有 性识别标记,标记间隔不大于1m,标记内容有:导线直径,线对数量,电缆型号,厂厂名代号,长度标记以间隔不大于1m标记在外表面上,但与上述标记错。
1. 对绞绝缘线芯2.聚酯薄膜3.铝箔4.纵放铜丝5.护套
CPEV 5*2*0.9 外径11.5mm 护套厚度1.3mm当达到值(--32768)时,在减计数输入端的下一个上升沿导致当前计数值变为值(32767)。当CXX的当前值大于等于预置值PV时,计数器位CXX置位。否则,计数器位关断。当复位端(R)接通或者执行复位指令后,计数器被复位。当达到预置值PV时,CTUD计数器停止计数。PS:CXX代表的是计数器的名称,是常数范围时从C0到C25,由于每一个计数器只有一个当前值,所以不要多次定义同一个计数器。(具有相同标号的增计数器、增/减计数器、减计数器访问相同的当前值。定子的各相激磁电流大小与相对应转子步进情况如本文图所示。此时,简化图,A相B相的节距θ0作步距角,转子每次电流各变化一次,每步进θ0/4,即已知步距角的四分之一。一般使用这种细分方法,可以使电流波形能够接近正弦波。此处增加细分步级的细分量,电流能近似正弦波,旋转转矩也能得到正弦波变化。2相步进电机的交链磁通与电流模型如下图所示。电流以角速度ω表示,A相比B相超前(π/2),电流公式如下所示:iA=IcosωtiB=Isinωt激磁磁通在A相与B相交链部分,考虑相位相差π/2,根据上图变成下式:ΦA=ΦcosθΦB=Φsinθ设A相转矩为TA,B相转矩为TB,2相微步进驱动时的转矩为T2,考虑 简单模型,令式(T1=NNrI(dΦ/dθ))中的N=1,Nr=l,则转矩公式如下所示:转子与定子的转动磁场同步,以负载角δ(如前文《PM型电机转矩的产生及负载角》及文《HB型电机的转矩与负载关系》的图中δ)转动,下式成立:θ=ωt-δ将上式3代入式式2,及θ=ωt-δ得下式:即T2为含ω的项消去,δ取一定值,能得到近似正弦波的转矩。
|